麻省理工学院的一组科研人员近日公开了一则视频,展示了其最新研制的自动驾驶式无人机。
手机用户观看地址 http://v.qq.com/page/a/f/3/a0171jzorf3.html
无需远程操纵,这台无人机即可凭借无人机自主导航系统和立体推扫式传感器检测障碍物进行高速飞行,并且在时速30英里(约48公里)的飞行速度下自如地穿梭树枝并躲避障碍。
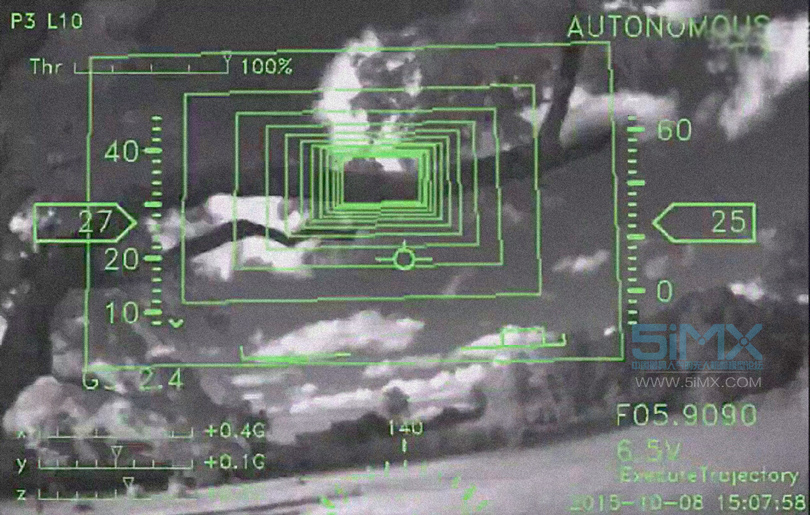
让无人机实现壮志凌云式自主飞行的关键在于采用了Adam Barry和Russ Tedrake联合麻省理工学院计算机科学和人工智能实验室(CSAIL)机器交通组共同研发的新型Pushbroom Stereo立体推扫式传感系统。
这套系统非常轻型,通过优化快速的算法实现在现实世界中预判障碍物进行自主飞行。这套无人机采用了分离式设计,包括了一套立体成像摄像传感器,以及性能同智能手机差不多的处理芯片。开发人员巴里介绍到这套新型系统能够快速测绘其路径上十米范围的物体,能够预先判断并计算出路径,实现高速的自主飞行和闪避障碍。

责任编辑:5imx
业界快讯 More
- 12-26 【5iMX新闻中心】卡勃力特发布6x6全轮驱动
- 12-26 品牌合作丨 Flysky&Sunpadow FS-ST8、FS-
- 08-15 航模行业新生力量!星奇世界发布 STARGAZER
- 10-26 FMS新品:1/12比例德国82型越野车
- 09-26 1:16 AVVX 验证型两栖战车中秋节正式服役

- 活动
- 精华
More
-

【5iMX评测室】卡勃力特新品K3364 6x6全轮
“前2后8”在当今依然是最主流最正统的自卸车类别。这种配置了3根车桥的自卸车,具有十分经济的装卸运载能力,深受业内人士的喜爱。 K… -

4K时代,大疆新一代穿越机图传套件O3 Air U
4K FPV过去只能挂GoPro或者OSMO Action,不仅笨重,而且麻烦,现在大疆全新一代4K画质的O3 Air Unit终于来了,与之搭配的还有Avata上面那套… -

史上最“耐炸”的无人机——大疆Avata飞行
玩过模型和无人机的朋友都知道什么叫“炸机”。几乎没有哪款无人机敢说自己耐炸,这不,大疆就发布了一款非常耐炸的无人机Avata(暂时没有…
-
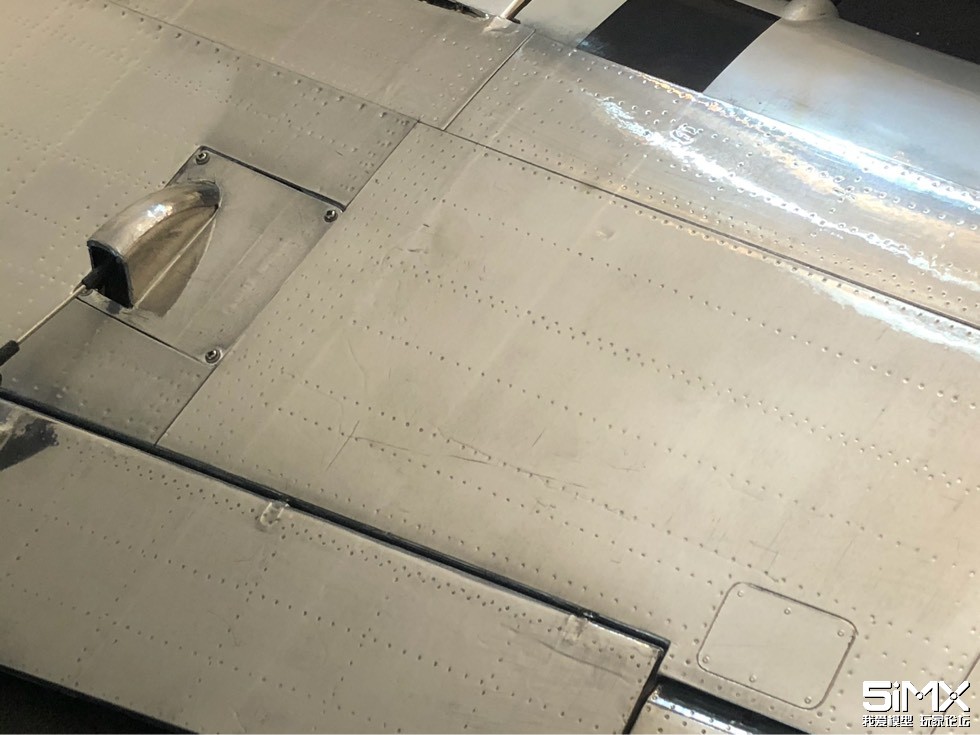
铝蒙皮二号机:P51野马(已完成)
自从上次海盗烂尾后一蹶不振,现在研究了新的铝蒙皮制作方法,开工第二架全金属飞机,福莱特的P51野马 从机翼开始 … -

CAPO JK CD15823 到底..這是什麼
CAPO JK , 這是一輛RC玩具? 這是一輛RC攀爬車? 這是一輛RC仿真車? 我認為....這是一件藝術品. 可惜的是...這車設計太前衛,太獨特,有別 … -

指导小学生 学习使用工具 制作模型飞机
指导小学生 学习使用工具 制作模型飞机 为什么要培养中小学生自己动手制作模型飞机? 这方面早在几十年前的航空 …
阅读排行 More
-
01
自制1/6全金属豹2
最近坦克中毒太深,决定亲手制作一台1 ... -
02
还是国产F3K性价比高,试飞1.5米全碳DLG St
这是目前市面上性价比非常高的一款F3K ... -
03
萝莉直流有刷电调越野车演练视频
视频奉上: https://www.bilibili. ... -
04
【 75mm DJI O3 4K时光记录机-Fairy Tale
https://www.bilibili.com/vide ... -
05
夏天来了大家来上图看下有什么新款水机
...
 /1
/1 
