前方记者 KID




无距科技的发展方向在哪里?

第一肯定是技术,主要是机器视觉和一些关键技术的突破。让无人机能够通过“眼睛”(机器视觉)去判断,通过“大脑”(机载计算机)去思考,然后通过飞控做出相应的动作。把视觉和控制深度的融合在一起,这将是未来无人机发展很重要的一个方向。

第三个是飞控技术,同时也是最重要的一点。我们的飞控必须扎根于某一个行业甚至某一个技术,先要把它做到完美,就需要飞控的研发人员与行业无人机的使用者进行长期沟通,及时发现问题(包括每一个小细节)。所以后来,我们努力的扎根于植保行业里面,把植保行业里面每一个用户对于植保操作过程当中的所有细节都把握住,把他们的真正问题通过飞控、大数据平台反映出来,解决问题。
面对无人机市场的快速发展,无距科技如何找准市场需求定位自己的产品?

现在市场上对于整机的普及度比较高,无距有没有考虑整机?

多旋翼发展已经这么成熟了,直机作为植保机是否有必要?

(图片来源于网络)
多旋翼和单旋翼各有千秋,由于多旋翼的易用性,现在大量应用于质保作业当中,确确实实解决了很多农户的问题。
多旋翼和单旋翼首先是结构上存在比较大的区别,多旋翼通过成对的旋翼系统,形成一个相对稳定的自稳结构,所以飞行操控都非常简单。多旋翼拥有结构简单,成本较低的优势,所以普及度也会比较高。但是缺点是动力形式由于是采用的多个螺旋桨产生的动力来抵抗重力,所以螺旋桨的功效是比较低的。与直升机相比,作业面积可能会有一定变化。

(图片来源于网络)
而且由于多旋翼的自身重量荷载重量比较轻,所以下压风场不够巨大,在喷洒一般的农作物是没有问题的。但是当在喷洒果树的时候,在其他条件没有变化的时候会造成下压风场不足,或者植物的根部会出现漏喷。
目前多旋翼的市场占有率相对还是要大一些,不过单旋翼无人机也有自己固有的优势(螺旋桨效率要高于多旋翼),随着直机在品质、可靠性,等一系列方向的逐步提高,直机也会变成一个非常容易操控,不需要专门培训飞手,并且做到全自主作业等一系列的功能。未来,多旋翼与单旋翼的应用将会出现一个相辅相成的局面,多旋翼在小型地块作业多一些,而直升机可能在大地块、农场作业应该会多一些。
以后是否考虑发展无人机集群作业?

(图片来源于网络)
再往上一层,飞机如何去编队如何去运动,这个和飞机的底层的结构没有直接联系,它就是只有一个指标,底层结构支持这个速度和轨迹成什么样的数学关系,再上层都是一样的。如果是植保机用一套地面站同时指挥3、4个飞机在不同的地块上作业,如果在一两公里之类,同时飞5架飞机作业可以采取亿航无人机编队类似的那种控制方式,要是更远、更可靠的话就需要采取更高级的控制方式了。
进行植保作业的时候,能不能够直接通过大数据给出具象化的作业指标?

多旋翼飞控

多旋翼飞控参数


直机飞控

直机飞控参数



责任编辑:5imx
业界快讯 More
- 12-26 【5iMX新闻中心】卡勃力特发布6x6全轮驱动
- 12-26 品牌合作丨 Flysky&Sunpadow FS-ST8、FS-
- 08-15 航模行业新生力量!星奇世界发布 STARGAZER
- 10-26 FMS新品:1/12比例德国82型越野车
- 09-26 1:16 AVVX 验证型两栖战车中秋节正式服役

- 活动
- 精华
More
-

【5iMX评测室】卡勃力特新品K3364 6x6全轮
“前2后8”在当今依然是最主流最正统的自卸车类别。这种配置了3根车桥的自卸车,具有十分经济的装卸运载能力,深受业内人士的喜爱。 K… -

4K时代,大疆新一代穿越机图传套件O3 Air U
4K FPV过去只能挂GoPro或者OSMO Action,不仅笨重,而且麻烦,现在大疆全新一代4K画质的O3 Air Unit终于来了,与之搭配的还有Avata上面那套… -

史上最“耐炸”的无人机——大疆Avata飞行
玩过模型和无人机的朋友都知道什么叫“炸机”。几乎没有哪款无人机敢说自己耐炸,这不,大疆就发布了一款非常耐炸的无人机Avata(暂时没有…
-
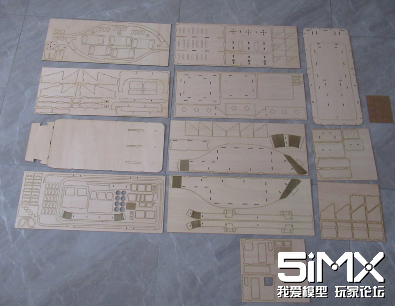
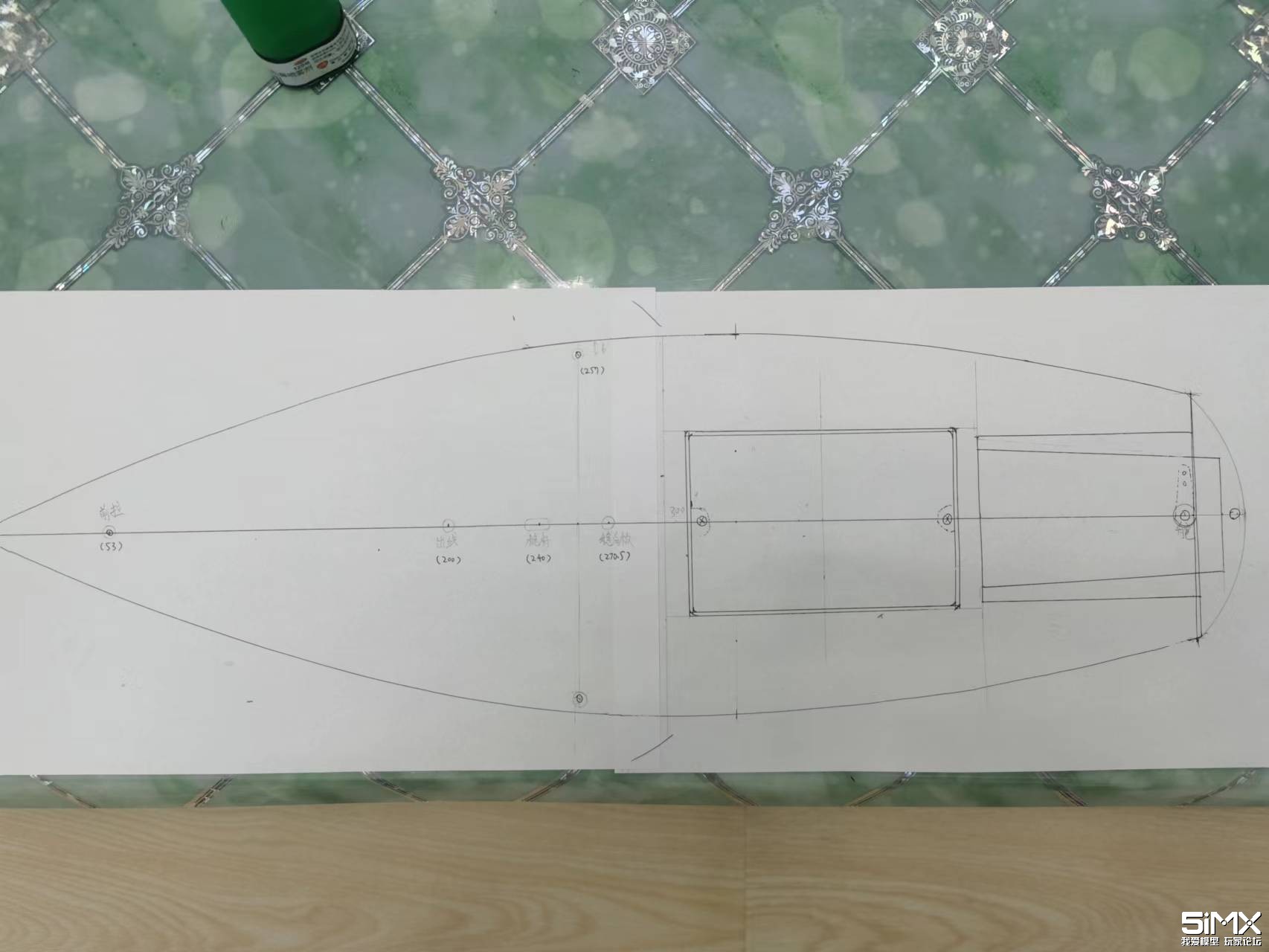
斯普林格顶推小拖船
重新画图斯普林格顶推船 长度57厘米拼装结构。废话不多说上制作步骤图片 … -
第一次尝试做帆船,感谢模友的支持和帮助
模友送的船壳,他自己做的 加固一下 画个夹板图 ABS板裁剪出型 箱套 一顿粘 做好零件安装后试水 完成,帆也是模友 … -

iom帆船建造全过程,持续更新。
2月份至今陆续制作中。没接触过这个级别的船体,各位老师前辈也请多多指点 …
阅读排行 More
-
01
飞过的象真机手感做个排名
这几年各种象真机飞了超过2500架次, ... -
02
单人单桨划桨船
划桨船已做过了几种,这次尝 ... -
03
斯普林格顶推小拖船
重新画图斯普林格顶推船 长度57厘米拼 ... -
04
好赢130A电调
问下大家,有没有人用好赢130A电调飞 ... -
05
帆系索桅桿系索
近来看到一些新船,很是欣慰。也来凑 ...
 /1
/1 
