文:KID/图:辰一
无人机发展到今天,已经有相当一部分具备了些许人工智能的因素在里面,而大家接触和听说的最多的就是智能避障技术了。为什么说加了避障的无人机就够智能了?这主要是由于目前市面上具备避障功能的无人机,无一例外的都采用了视觉避障的模式,而视觉避障中所包含的机器视角正是人工智能领域中的一个技术。(由于篇幅限制,这里就不对机器视角做过多的讲解,想要了解的朋友请自行百度。)

从今年年初昊翔 Typhoon H480的发布并进行了首次进行的避障演示,到3月份带避障功能的大疆精灵4的发布和上市,都让我们深切的感受到智能无人机真的来了。
根据官方发布的数据来看,昊翔 Typhoon H480的避障模式似乎要比大疆精灵4更智能一些。H480采用的Intel RealSense技术能够实现全天候大多数环境下的智能避障,在这个过程中,H480不但会根据周围的环境进行建模并计算,并且能够将这些数据保存30秒。也就是说只要在30秒内,只要是通过RealSense扫描建模的区域,即使避障模块没有对准障碍物,也能实现避障。
而大疆精灵4采用的是可见光视觉避障,能够识别5米左右的障碍物并选择悬停或者躲避,而且对光线和物体表面的纹理要求也比较高。大疆的避障更像是雷达,先探测到有障碍物,然后进行一种条件反射式的躲避。而昊翔的似乎更智能一些,能够感知周围的环境,并选择最佳的飞行路线来主动绕开这些障碍物。
 那么基于英特尔RealSense传感器的昊翔Typhoon H480究竟是个什么样子呢?避障对于无人机来说究竟意味着什么?虽然之前我们之前也非常细致的对昊翔的避障进行了细致的分析,但是空口无凭,当拿到实际的之后我们便在第一时间对昊翔 Typhoon H480进行了细致的开箱测评,更多的功能和细节测试也将在稍后放出……
那么基于英特尔RealSense传感器的昊翔Typhoon H480究竟是个什么样子呢?避障对于无人机来说究竟意味着什么?虽然之前我们之前也非常细致的对昊翔的避障进行了细致的分析,但是空口无凭,当拿到实际的之后我们便在第一时间对昊翔 Typhoon H480进行了细致的开箱测评,更多的功能和细节测试也将在稍后放出……
外包装
 这是H480寄过来的样子,外层纸箱是昊翔的英文LOGO“Yunnec”。实不相瞒,由于中学时期不爱学英语,KID在第一次接触到这个单词的时候读成了“尤尼克斯”,后来经过高人指点才知道正确的发音原来是“尤尼克”,搞得我尴尬症都犯了。
这是H480寄过来的样子,外层纸箱是昊翔的英文LOGO“Yunnec”。实不相瞒,由于中学时期不爱学英语,KID在第一次接触到这个单词的时候读成了“尤尼克斯”,后来经过高人指点才知道正确的发音原来是“尤尼克”,搞得我尴尬症都犯了。


 打开外包装,里面直接就是一个便携背包,三维尺寸分别是:宽40厘米、高50厘米、厚30厘米。整个背包方方正正的,外观没有丝毫多余的挂件和装饰。
打开外包装,里面直接就是一个便携背包,三维尺寸分别是:宽40厘米、高50厘米、厚30厘米。整个背包方方正正的,外观没有丝毫多余的挂件和装饰。
 相对于精灵4来说,这个背包还是有点大,但是与昊翔的上一代产品Q500的铝箱相比,这个尺寸和重量已经算小的了。
相对于精灵4来说,这个背包还是有点大,但是与昊翔的上一代产品Q500的铝箱相比,这个尺寸和重量已经算小的了。

 在背包的顶部有一个杂物包,足够容纳一个遥控器外加2块电池。
在背包的顶部有一个杂物包,足够容纳一个遥控器外加2块电池。
 在两侧还各有一个网袋,能够轻松装下两瓶矿泉水。
在两侧还各有一个网袋,能够轻松装下两瓶矿泉水。
 背包的背带这一面设计了带透气纱网的弹性背垫,有利于减轻长期背负时背部负担及散热。
背包的背带这一面设计了带透气纱网的弹性背垫,有利于减轻长期背负时背部负担及散热。
 背包带有点类似户外双肩包,腰扣能够进一步减轻使用者的负担,D扣可以加挂水壶之类的设备。背包带上的“TYPHOON H”开始我以为是个眼镜挂带其实不是,它就只是个标志
背包带有点类似户外双肩包,腰扣能够进一步减轻使用者的负担,D扣可以加挂水壶之类的设备。背包带上的“TYPHOON H”开始我以为是个眼镜挂带其实不是,它就只是个标志 。
。

 打开背包,飞机和各个零部件由EPO泡沫内胆保护。这种叫做EPO的材料,是由30%的聚乙烯和70%的聚苯乙烯组成的一种“共聚物”,具有很高的耐撕裂、耐戳穿、耐刮和耐碎裂性。大疆精灵4的包装内胆*也是采用的这种材料。
打开背包,飞机和各个零部件由EPO泡沫内胆保护。这种叫做EPO的材料,是由30%的聚乙烯和70%的聚苯乙烯组成的一种“共聚物”,具有很高的耐撕裂、耐戳穿、耐刮和耐碎裂性。大疆精灵4的包装内胆*也是采用的这种材料。

H480标准版(单电)池包装内胆
 由于H480 RealSense版增加一块电池,相对于较早推出的H480标准版而言,内胆会布局稍有不同,外形尺寸也要大一些。
由于H480 RealSense版增加一块电池,相对于较早推出的H480标准版而言,内胆会布局稍有不同,外形尺寸也要大一些。

 当然,这个内胆也是可以取下来单独使用的。
当然,这个内胆也是可以取下来单独使用的。
Typhoon H480


 取出飞机,折叠状态下的H480外形尺寸为280x350x250(长x宽x高,单位:mm),乍一看有点像个机器人。
取出飞机,折叠状态下的H480外形尺寸为280x350x250(长x宽x高,单位:mm),乍一看有点像个机器人。

 折叠机臂虽然有利于便携,但同时也使电线加速磨损、老化。为了解决这个问题,在电机的电源线外面有一层伸缩编制网管。不过既然电机的电源线都包进去了,信号线却留在外面,不知道厂家是怎么想的。
折叠机臂虽然有利于便携,但同时也使电线加速磨损、老化。为了解决这个问题,在电机的电源线外面有一层伸缩编制网管。不过既然电机的电源线都包进去了,信号线却留在外面,不知道厂家是怎么想的。

 机臂的展开、回收都非常简单,展开的时候只需要将机臂轻轻往上抬起,听到“咔哒”一声就说明机臂已经固定好了;回收的时候也只需要按住机臂的“PRESS”,轻轻往下掰就可以了。
机臂的展开、回收都非常简单,展开的时候只需要将机臂轻轻往上抬起,听到“咔哒”一声就说明机臂已经固定好了;回收的时候也只需要按住机臂的“PRESS”,轻轻往下掰就可以了。
 H480的电机采用的是外转子无刷电机,在转动的时候能够感觉到电机除了磁力以外,还带有一点比较明显的阻尼,在电机没有动力的情况下会很快停止转动。
H480的电机采用的是外转子无刷电机,在转动的时候能够感觉到电机除了磁力以外,还带有一点比较明显的阻尼,在电机没有动力的情况下会很快停止转动。

 H480的螺旋桨采用快拆设计,不过外面的定位卡槽有四个,但是里面的固定卡槽只有两个,所以在装的时候需要注意一下安装的角度和位置。
H480的螺旋桨采用快拆设计,不过外面的定位卡槽有四个,但是里面的固定卡槽只有两个,所以在装的时候需要注意一下安装的角度和位置。



 H480采用六轴设计,轴距为480mm。即使一个电机/螺旋桨坏掉了也能够返航,增加了飞机的安全性。不过如果真的发生这种情况的时候,是否会和宣传的一样呢?期待测试的表现。
H480采用六轴设计,轴距为480mm。即使一个电机/螺旋桨坏掉了也能够返航,增加了飞机的安全性。不过如果真的发生这种情况的时候,是否会和宣传的一样呢?期待测试的表现。
 细心地模友可能会发现,H480的电机的轴线其实并不是垂直于水平面的,每个电机都有向外0.75°左右的倾斜,同时,六个机臂都有一个向上的倾角,这有利于降低飞机的重心,使飞行更稳定。
细心地模友可能会发现,H480的电机的轴线其实并不是垂直于水平面的,每个电机都有向外0.75°左右的倾斜,同时,六个机臂都有一个向上的倾角,这有利于降低飞机的重心,使飞行更稳定。
 H480 RealSense版总重2017g,相比其前辈Q500重了317克,比标准版重了322克,这些增加的重量基本上是来自于RealSense避障模块。
H480 RealSense版总重2017g,相比其前辈Q500重了317克,比标准版重了322克,这些增加的重量基本上是来自于RealSense避障模块。
RealSense避障
 H480最大的亮点无疑使这一套RealSense系统了,通过RealSense R200相机和英特尔Atom凌动处理器,能够为H480构建一个虚拟的3D环境,并且在30秒以内为其提供避障所需的环境信息。
H480最大的亮点无疑使这一套RealSense系统了,通过RealSense R200相机和英特尔Atom凌动处理器,能够为H480构建一个虚拟的3D环境,并且在30秒以内为其提供避障所需的环境信息。
 RealSense的避障技术采用的是结构光加可见光的“双目视觉”的原理,由红外激光发射器发射红外光,分布在两边的红外传感器根据视差,利用三角定位,来判断物体的距离。但是这种结构的双目避障只能实现3-15米的避障范围,所以3米以内的避障还需要超声波进行辅助定位。
RealSense的避障技术采用的是结构光加可见光的“双目视觉”的原理,由红外激光发射器发射红外光,分布在两边的红外传感器根据视差,利用三角定位,来判断物体的距离。但是这种结构的双目避障只能实现3-15米的避障范围,所以3米以内的避障还需要超声波进行辅助定位。
 而下视的定位则是依靠飞机底部的光流和超声波。同时,这里也是安装RealSense芯片的地方,发热量比较大,为了方便散热,在超声波的前后各设置了一个风扇和一排散热孔。
而下视的定位则是依靠飞机底部的光流和超声波。同时,这里也是安装RealSense芯片的地方,发热量比较大,为了方便散热,在超声波的前后各设置了一个风扇和一排散热孔。

.jpg") 飞机的调参接口与RealSense的调参接口是分开设置的,可能是考虑到未来出单独的RealSense模块,方便单独调参使用。
飞机的调参接口与RealSense的调参接口是分开设置的,可能是考虑到未来出单独的RealSense模块,方便单独调参使用。


 拆下来的RealSense长这样,飞机上已经为升级RealSense预留好了安装螺丝孔,标准版H480直接将原先的超声波/光流定位模块拆下来,就可以装上RealSense模块了。不过目前还没有相关的升级教程,有兴趣升级的模友可以先研究一下,升级教程也许会有~
拆下来的RealSense长这样,飞机上已经为升级RealSense预留好了安装螺丝孔,标准版H480直接将原先的超声波/光流定位模块拆下来,就可以装上RealSense模块了。不过目前还没有相关的升级教程,有兴趣升级的模友可以先研究一下,升级教程也许会有~
CGO3+云台
 H480采用的是能够360°旋转的CGO3+三轴自稳球形云台,外形与Q500的CGO3几乎没什么差别。
H480采用的是能够360°旋转的CGO3+三轴自稳球形云台,外形与Q500的CGO3几乎没什么差别。


 CGO3+整体采用ABS塑料材质,最初从官网上看到的貌似金属UV镜拿到手中也变成了纯黑色的塑料。这可能是个别问题,并不会影响云台的正常使用。
CGO3+整体采用ABS塑料材质,最初从官网上看到的貌似金属UV镜拿到手中也变成了纯黑色的塑料。这可能是个别问题,并不会影响云台的正常使用。

 之前就有模友吐槽说云台的旋转轴有点偏左右间隙不一致,从我们拿到的产品来看,似乎也有这个问题。
之前就有模友吐槽说云台的旋转轴有点偏左右间隙不一致,从我们拿到的产品来看,似乎也有这个问题。

 安装云台的塑料滑轨比较薄,起来感觉并不是很牢固。
安装云台的塑料滑轨比较薄,起来感觉并不是很牢固。
 CGO3+的云台相对于Q500的CGO3重了48g,360°旋转的功能和2公里的图传距离估计这一部分重量增加的主要原因了吧。
CGO3+的云台相对于Q500的CGO3重了48g,360°旋转的功能和2公里的图传距离估计这一部分重量增加的主要原因了吧。

 由于云台能够360°旋转,为了在航拍的过程中不受起落架的影响,所以昊翔的起落架也是可以收起来的。而且相比之前的Q500来说,这种360°的云台拍摄更自由,画面也更稳定。
由于云台能够360°旋转,为了在航拍的过程中不受起落架的影响,所以昊翔的起落架也是可以收起来的。而且相比之前的Q500来说,这种360°的云台拍摄更自由,画面也更稳定。
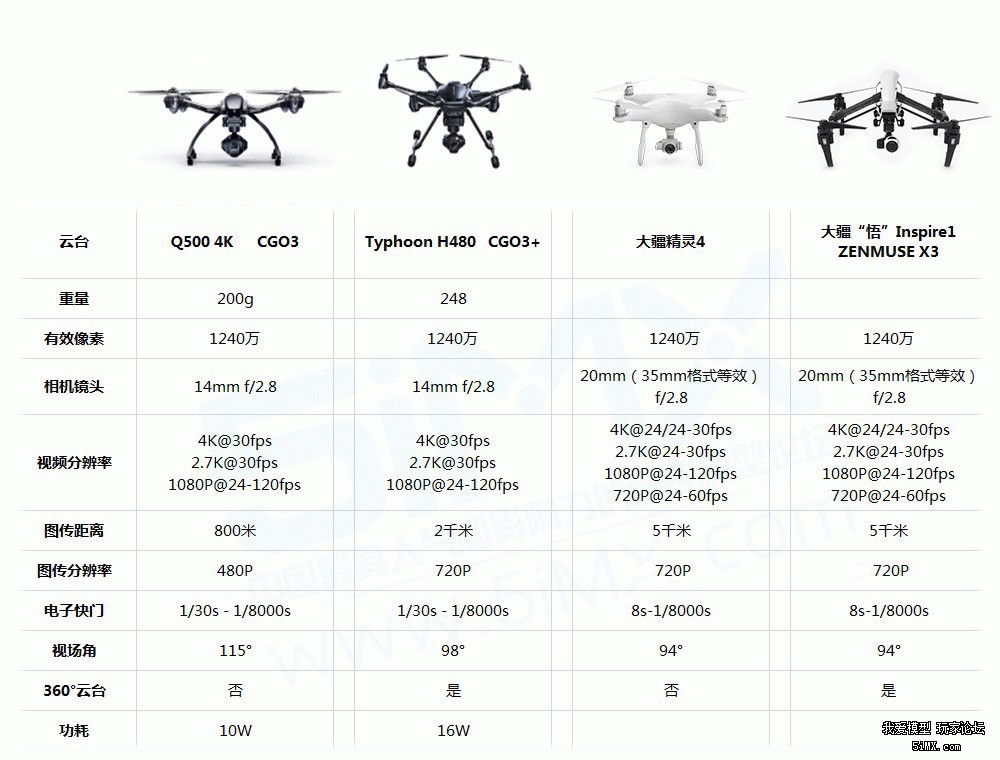
从上面的数据对比来看,升级过后的CGO3+与CGO3最大的区别在于FOV视角减小到了98°,拍摄时镜头畸变更小了;由于云台实现了360°旋转,并且将图传距离增加到了,所以重量和功耗也有所增加,重量为248g,功耗为16W。相对于大疆的两款无人机来说,H480的相机的拍摄画面分辨率和像素基本相同。与大疆精灵4的固定云台相比,360°旋转的云台拍起来会更自由一点,在这方面的体验能够达到悟的水平。H480采用的是WiFi数字图传,图传分辨率与大疆精灵4和悟相同,均为720P。不过在图传距离上显然不如采用LightBridge的两款飞机,而且全塑料的云台似乎也不及精灵4的牢固。
细节做工
 H480采用的是GPS+GLONASS的双模定位,除此之外,在飞机的底部还有超声波和光流定位模块。在GPS天线的周围还有散热孔,发热较大的电子元件基本上都集中在这个区域。KID下午顶着大太阳拿出去飞了一下,三块电池飞完,这个区域测出来的温度能够达到50℃,电机也有45℃以上。不过还好,飞机没有出现任何问题。
H480采用的是GPS+GLONASS的双模定位,除此之外,在飞机的底部还有超声波和光流定位模块。在GPS天线的周围还有散热孔,发热较大的电子元件基本上都集中在这个区域。KID下午顶着大太阳拿出去飞了一下,三块电池飞完,这个区域测出来的温度能够达到50℃,电机也有45℃以上。不过还好,飞机没有出现任何问题。

 在保证机身强度的前提下,为了尽量减轻飞机重量,机臂和起落架均采用碳纤维管(机臂和起落架直径12mm,起落架横杆直径10mm),并且为了减轻降落时飞机的弹跳,在起落架横杆两头还套了一圈海绵减震,细节方面考虑的比较周到。
在保证机身强度的前提下,为了尽量减轻飞机重量,机臂和起落架均采用碳纤维管(机臂和起落架直径12mm,起落架横杆直径10mm),并且为了减轻降落时飞机的弹跳,在起落架横杆两头还套了一圈海绵减震,细节方面考虑的比较周到。


 不过昊翔在外观的做工上还是有待提升的,有些接缝开口比较大,看起来比较粗糙。辰一在拍完照之后谈到:“昊翔H480的整体外观设计非常合我的胃口,多处散热孔的设计结合圆润的线条,给人一种肌肉感强烈的科技感。但在材质的工艺做工方面让人有点失望,特别是外壳接缝处和云台使用的材料。如果昊翔能够在材质做工方面留点心,解决这些显而易见的问题,至少在工业设计方面昊翔H480,完全能对得起它的身价。”
不过昊翔在外观的做工上还是有待提升的,有些接缝开口比较大,看起来比较粗糙。辰一在拍完照之后谈到:“昊翔H480的整体外观设计非常合我的胃口,多处散热孔的设计结合圆润的线条,给人一种肌肉感强烈的科技感。但在材质的工艺做工方面让人有点失望,特别是外壳接缝处和云台使用的材料。如果昊翔能够在材质做工方面留点心,解决这些显而易见的问题,至少在工业设计方面昊翔H480,完全能对得起它的身价。”
ST16遥控器

 H480的的遥控器直接集成了一块7寸的平板在上面,所以其整体尺寸非常大,飞行的时候如果没有遥控器吊带的话,还真有点不方便。同时这款遥控器还跟昊翔的另一款无人机H920的ST24遥控器非常相似。不同之处在于ST16只有个16各个通道,而ST24则是有24个通道。ST16可以看做是ST24的简化版。不仅如此,H480也可以实现双控,这样,飞手就可以专心开飞机,云台手则专注于拍摄身边的风景。
H480的的遥控器直接集成了一块7寸的平板在上面,所以其整体尺寸非常大,飞行的时候如果没有遥控器吊带的话,还真有点不方便。同时这款遥控器还跟昊翔的另一款无人机H920的ST24遥控器非常相似。不同之处在于ST16只有个16各个通道,而ST24则是有24个通道。ST16可以看做是ST24的简化版。不仅如此,H480也可以实现双控,这样,飞手就可以专心开飞机,云台手则专注于拍摄身边的风景。
 遥控器开关是滑动式的,可以避免因为误触造成的开关机。
遥控器开关是滑动式的,可以避免因为误触造成的开关机。

S2.云台水平模式共有三个档位F档(跟随模式)、1档(跟随水平可控)和G档(定向模式),在A档情况下,不能借助K1(云台水平控制旋钮)调整云台的方向,始终保持与飞机的机头方向一致;在1档的情况下,可以借助K1调整云台方向,当飞机在转动时云台也会跟着转动;在G档的情况下,无论飞机怎么转动,云台都固定在一个方向,只能靠K1来调节云台的方向。



S4.飞行模式开关,“SMART”智能飞行模式,H480会始终朝着俯仰和副翼摇杆推动的方向飞行,与机头指向无关;“ANGLE”气压飞行模式,H480会依照飞机机头的方向执行摇杆指令;“HOME”返航模式,自动返航不用多说了,如果飞机与遥控器失联的时候也会触发返航功能,这个时候飞机返航会悬停在空中,不过在返航模式下似乎没有避障功能。
 起落架收放开关:“DOWN”放下起落架,“UP”收起起落架;在降落的时候要注意提前放下起落架,以免损坏云台和飞机。
起落架收放开关:“DOWN”放下起落架,“UP”收起起落架;在降落的时候要注意提前放下起落架,以免损坏云台和飞机。
 飞行速度调节滑块:滑块靠近乌龟,飞机的反应速度比较慢,这种模式比较适合小白用户;滑块靠近兔子,飞机操控比较灵活,这种模式比较适合老司机。
飞行速度调节滑块:滑块靠近乌龟,飞机的反应速度比较慢,这种模式比较适合小白用户;滑块靠近兔子,飞机操控比较灵活,这种模式比较适合老司机。
 H480 RealSense版与标准版相比,遥控和图传距离都有所提升,除了内部的电子元件外,最明显的就是外面的三根天线了,两根2.4GHz天线是飞机的遥控天线,5.8GHz定向天线是图传天线。除此之外,ST16还有一个HDMI接口,能够将接收到的图像通过HDMI传输到其他的显示设备上,实现实时直播。
H480 RealSense版与标准版相比,遥控和图传距离都有所提升,除了内部的电子元件外,最明显的就是外面的三根天线了,两根2.4GHz天线是飞机的遥控天线,5.8GHz定向天线是图传天线。除此之外,ST16还有一个HDMI接口,能够将接收到的图像通过HDMI传输到其他的显示设备上,实现实时直播。

 遥控器底部的数据线、耳机插口和TF卡卡槽。由于遥控器本身集成了一块7寸平板,所以这个卡槽不但可以用于充电,还可以用于平板与电脑互传数据。
遥控器底部的数据线、耳机插口和TF卡卡槽。由于遥控器本身集成了一块7寸平板,所以这个卡槽不但可以用于充电,还可以用于平板与电脑互传数据。
电池及其他配件


 H480的电池为5400mAh 14.8V 4S(79.9Wh)锂电池,官方宣布的续航时间为25分钟。相对于大疆精灵4采用的5350mAh 15.2V 4S(81.3Wh),续航28分钟的成绩来说略微要差一点。不过相对于从电池的接口上还是可以看到,H480的电池智能化程度相对于他的前辈们来说还是有所提高。
H480的电池为5400mAh 14.8V 4S(79.9Wh)锂电池,官方宣布的续航时间为25分钟。相对于大疆精灵4采用的5350mAh 15.2V 4S(81.3Wh),续航28分钟的成绩来说略微要差一点。不过相对于从电池的接口上还是可以看到,H480的电池智能化程度相对于他的前辈们来说还是有所提高。

 为了有利于电池的插拔,在电池的尾部专门设计了一个扣具,非常的人性化。
为了有利于电池的插拔,在电池的尾部专门设计了一个扣具,非常的人性化。


 电池的充电器支持输入电压比较宽泛,电源适配器的电压从10.5V-21V都可以,额定输入电流为4.6A。座充的输出电压也从12V-16.8V不等,额定输出电压4A。在座充侧面还配有一个5V 2A的USB插口,能够同时为遥控器充电。在最快的情况下,充满一节电池需要1小时10分钟,官方标配的电源适配器输出电压为19V 4.74A,实测充电时间在1个小时25-30分钟左右,充电速度还是比较不错。
电池的充电器支持输入电压比较宽泛,电源适配器的电压从10.5V-21V都可以,额定输入电流为4.6A。座充的输出电压也从12V-16.8V不等,额定输出电压4A。在座充侧面还配有一个5V 2A的USB插口,能够同时为遥控器充电。在最快的情况下,充满一节电池需要1小时10分钟,官方标配的电源适配器输出电压为19V 4.74A,实测充电时间在1个小时25-30分钟左右,充电速度还是比较不错。
外包装
H480标准版(单电)池包装内胆
Typhoon H480
螺旋桨拆装示意图
RealSense避障
后部散热孔
CGO3+云台
数据线接口和TF卡槽
细节做工
ST16遥控器
遥控器左侧按钮:
S1.云台俯仰模式仅在A档(角度模式)和V档(速度模式)发挥作用,1档等同于A档。当处于A档时,滑动相机的俯仰滑块,相机随滑块的位置位置运动,俯仰速度固定;当处于V档时,相机的俯仰速度随滑块滑动幅度的大小改变,当滑块居中时,相机停止俯仰,不过这个滑块在居中的时候没有一个比较明显的界定,只能凭感觉自己摸索。S2.云台水平模式共有三个档位F档(跟随模式)、1档(跟随水平可控)和G档(定向模式),在A档情况下,不能借助K1(云台水平控制旋钮)调整云台的方向,始终保持与飞机的机头方向一致;在1档的情况下,可以借助K1调整云台方向,当飞机在转动时云台也会跟着转动;在G档的情况下,无论飞机怎么转动,云台都固定在一个方向,只能靠K1来调节云台的方向。
相机俯仰滑块:用于相机的俯仰调节。
解锁按钮:在飞机准备就绪的时候长按3S,飞机解锁,降落后长按3S飞机锁定。
遥控器右侧控制按钮:
S3.避障开关,仅“NO”档起作用,“OFF”和“1”均处于关闭状态;S4.飞行模式开关,“SMART”智能飞行模式,H480会始终朝着俯仰和副翼摇杆推动的方向飞行,与机头指向无关;“ANGLE”气压飞行模式,H480会依照飞机机头的方向执行摇杆指令;“HOME”返航模式,自动返航不用多说了,如果飞机与遥控器失联的时候也会触发返航功能,这个时候飞机返航会悬停在空中,不过在返航模式下似乎没有避障功能。
遥控器背后的散热风扇。
电池及其他配件



H480与它的前辈和竞争对手
H480从一开始发布就注定有着不寻常的经历。在年初在CES展会上,昊翔对H480的避障进行了室内演示,先是受到广大吃瓜群众的热捧,大赞其避障技术之牛掰。没过多久,众多媒体、厂家和模友便纷纷质疑昊翔的避障技术有作弊嫌疑。然后又因为一些专利问题,惹上了大疆摊上了官司,使得好像不得不将H480的上市时间推迟到了5月份,而RealSense版本也是到了最近几天才开始发货。




业界快讯 More
- 12-26 【5iMX新闻中心】卡勃力特发布6x6全轮驱动
- 12-26 品牌合作丨 Flysky&Sunpadow FS-ST8、FS-
- 08-15 航模行业新生力量!星奇世界发布 STARGAZER
- 10-26 FMS新品:1/12比例德国82型越野车
- 09-26 1:16 AVVX 验证型两栖战车中秋节正式服役

- 活动
- 精华
More
-

【5iMX评测室】卡勃力特新品K3364 6x6全轮
-

4K时代,大疆新一代穿越机图传套件O3 Air U
-

史上最“耐炸”的无人机——大疆Avata飞行
-
PITTS M12 轻木双翼机开工
-
固定翼模型入门---完全自学的固定翼遥控航
-

阅读排行 More
-
01
5iMX签到帖(2024-04-19)
转向灯失灵了,由于您累计签到3661次, ... -
02
K8
K8.也就是现在G8.工厂停产了,现在买 ... -
03
新款手摇泵收到货啦
整体6061 t3加工,齿轮7075加工后表面 ... -
04
全球大嘴鸟头罩哪里可以买到
头罩炸碎了长换一个某宝问了好多家都 ... -
05
【 75mm DJI O3 4K时光记录机-我们的时光
https://www.bilibili.com/vide ...
 /1
/1 
