
4月2日,DJI大疆创新在美国加州中区联邦地方法院起诉昊翔国际有限公司(Yuneec International Co.Ltd)及昊翔美国公司(Yuneec USA)侵犯其在美国获得授权的专利,并要求在北美范围内申请销售保护,禁售昊翔Typhoon H系列无人机。
消息一经发布,便引发了媒体和业界资深人士的广泛讨论。
有学者认为:专利的作用就是用来保护申请者权利的,Yuneec如果侵犯了DJI的技术核心,以此寻求诉诸法律,是可以理解的。
但也有人指责DJI:频繁进行专利诉讼,目的只是为了拖延这些公司的产品在海外的上市时间,因为在最终判决前,这些公司的产品无法获得销售许可。
还有人认为:之所以DJI紧盯着Yuneec,是因为Intel的资金和技术帮助Yuneec快速成长已经构成威胁。尤其在新一代的智能无人机竞争中,唯一有望对抗DJI精灵4的产品——Typhoon H发布之际,来这么一场官司,显然是为了扰乱Yuneec的布局,给自家的精灵4产品留足销售时间。
孰是孰非,我们5iMX不是专利专家不好判断(国外专利官司非常复杂,通常要打1-2年才有结果)。今天,5iMX只从一个模友的角度,研究一下专利纠纷中很重要的一点,也是广大模友和无人机爱好者最关心的热点话题——避障技术。旨在分享一些研究心得,与这场官司孰是孰非无关。
DJI认为Yuneec侵犯了哪两项专利?
起诉书称,大疆受到侵犯的美国授权专利包括“目标跟踪的系统和方法”(美国专利编号 9,164,506 )与“可更换的云台”(美国专利编号 9,280,038)两项。其中目标跟踪的系统和方法主要是针对的昊翔的避障功能。
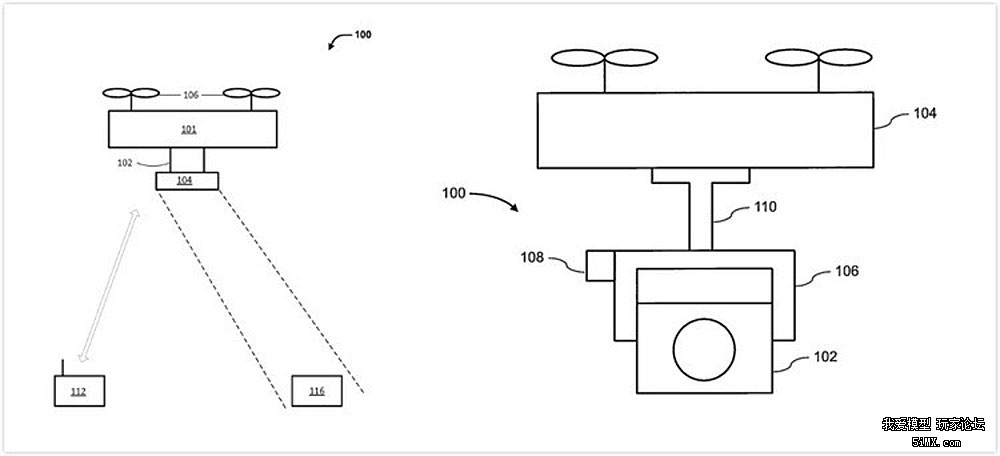
我们先来看看大疆的精灵4避障原理:借鉴仿生学原理,利用左右两只眼睛看到物体的视觉差,获得物体深度和距离的信息。精灵4能够识别大于500像素,最近0.7米,最远15米的障碍物;水平视角60°,垂直视角为30°。


注:精灵4在机身前部脚架上方安置有两只摄像头,通过这两只摄像头捕捉到的画面,利用计算机快速完成三维建模,便可发现前方的障碍物。俗称“双目视觉避障”系统。
通过观察大疆最早发布的Guidance避障模块便能发现,精灵4的双目避障其实是沿用了Guidance的核心算法,但又有所区别。从下图可以看出,Guidance是“双目+超声波”的复合避障结构,而精灵4取消了超声波辅助,只沿用了双目避障系统。

注:Guidance是“双目视觉+超声波”的复合避障结构
双目视觉避障的优势体现在距离远(15米),能保证三维信息精准。缺点是弱光环境下(夜晚)不行,另外无法识别电线、树枝等细小障碍物。
那么问题来了
Yuneec的Typhoon H也是采用的类似的避障系统吗?
从我们获取的信息来看,Yuneec是采用的Intel的RealSense(实时感知)技术。RealSense其实就是一个自带实感技术的摄像头系统,有F200、R100、R200三款产品,其中比较常见的是F200和R200。其中F表示前置摄像头(就是用来自拍的那个),R表示后置摄像头,由于早期的定位原因,所以就以手机和平板上的前后置摄像头来命名了。
RealSense能够通过计算所拍摄物体与摄像头的距离,从而获得景深数据,对物体进行定位。当然,既然有了位置信息,就可以让无人机实现自主避障。整体的原理与微软的Kinect接近。这也就是为什么英特尔在演示RealSense技术的时候,其形式和 Xbox 的体感游戏类似了。


注:Intel RealSense F200实感3D方案内部构造
F200方案采用“结构光”的原理,由红外激光发射机发射结构化模式的第1类红外光,红外传感器用于捕捉物体的尺寸特征,而位于中间的色彩传感器则用于捕捉画面细节。不过F200有效距离只有0.2~1.2米,因此只能用于室内。

注:Intel RealSense R200实感3D方案内部构造
R200采用“双目视觉”的原理,由红外激光发射器发射红外光,分布在两边的红外传感器根据视差,利用三角定位,来判断物体的距离,同样可以对物体进行定位。虽然在细节处理上R200不如F200,但其室内使用距离为3~4米,在室外距离更远。据此可以断定,Typhoon H无人机采用的就是R200的方案。

注:Yuneec Typhoon H采用的是Intel RealSense + 超声波辅助避障系统。
Intel研发RealSense的目的不仅仅是为了无人机避障,而是能够精确识别手势动作、面部特征、前景和背景等,进而让设备理解人的动作和情感。
另外从上图可以看出,Typhoon H在RealSense技术的基础上,还加入了超声波辅助避障。如此一来,即便在光线微弱、甚至无光的环境下也能实现较好的避障效果(能自己发射红外线和超声波)。当然,这只是我们的推测,实际效果必须等到产品测试后才能确定。
这是5iMX前不久获得的Yuneec Typhoon H的国外测试视频,从视频可以看出,Typhoon H不仅能很好地识别树枝等障碍物,还能自动规划路线,而不是像精灵4那样在“悬停”在障碍物前面。
从最基本的避障原理来看,大疆采用的是基于可见光的双目视觉避障技术,而Yuneec采用的是基于可见光+红外线+超声波的三目避障技术(RGB摄像头+2个红外线摄像头)。大疆的双目避障系统在光线较好的情况下可以发挥出较好的效果,而在光线较弱的夜间(光照度小于15流明)和任何纯色的表面情况下将失灵。Yuneec的避障系统由于是自发光,在光线微弱的情况下也能工作,但在光线较强的情况下可能受到自然界红外光的干扰。两项技术孰优孰劣还真不好说。
不过Typhoon H的超声波辅助测距的部分貌似和DJI Guidance是一样的,不知道专利是否也包含了这个部分。

不过有趣的是,5iMX在研究了Yuneec刚刚发布的一段Typhoon H的宣传视频后发现,里面的这款机器并没有搭载Intel Realsense模组。我们猜测也许Yuneec会弄至少两个配置出来:包含Realsense避障模组的Typhoon H和只包含超声波模组的Typhoon H,前者避障效果更好、距离更远,可以实现自动绕开障碍物飞行,而后者只能实现较短距离(也许5米)的避障功能(原地悬停)。同样,这也是推测,也许Realsense是一个选配件,单独销售也说不定。
Yuneec昊翔Typhoon H最新产品视频
BTW:从视频来看,Typhoon H除了收放起落架以外,还采用了360°无限制的旋转云台,这也是非常吸引人的地方。




关于技术的分析,本文到此为止,欲知更多信息,请关注www.5iMX.com后续报道。
关于这场官司大家的看法(来源于网络)
无人机从业者大木:“这个官司就是个无底洞,但舆论的口水也能左右一批人对昊翔的看法。”
零度智控创始人杨建军:"像手机行业一样,专利诉讼会是常态,具体打官司的时候,分辨专利侵权,以及判断专利的有效性,是很专业的事情,没到事情经过法院和专利部门认定,有在PR上做文章的嫌疑。"
哈工大智控研究所学者沈俊楠:“这一次起诉,如果昊翔真正侵犯了大疆的技术核心,以此寻求诉诸法律,是可以理解且情有可原的。但按理说昊翔在开发技术之前就会做相关调研。另外要注意的是,技术和专利大多时候都不是一个统一的整体,大疆很久之前就申请了四轴的专利,但现在市场上还是四轴在满天飞,这一次大疆告昊翔要么是真正掌握了昊翔偷技术的证据,要么就是想搞个新闻而已。”
无人机爱好者Victor:“在此前的精灵4的发布会上,大疆还吐槽竞争对手的产品不能上市发货,仅仅是实验室级别的产品。虽然没有指明是谁,但还是可以看出大疆非常在意竞争对手。”(指Yuneec在CES上做得演示有作弊行为)
XX网编辑:其实在昊翔之前,已有多家公司成为大疆的控诉对象,雷柏科技、零度智控、华科尔科等无人机公司均与之有专利纠纷,无人机产业正在陷入“专利泥潭”之中。
SZ某无人机厂商:大疆频繁进行“专利”诉讼,只是为了拖慢这些公司的产品在海外上市的节奏。因为在最终判决之前,这些公司的产品不会得到销售许可,这等于给大疆留下了更多时间。
SZ某无人机厂商:大疆频繁进行“专利”诉讼,只是为了拖慢这些公司的产品在海外上市的节奏。因为在最终判决之前,这些公司的产品不会得到销售许可,这等于给大疆留下了更多时间。

责任编辑:5imx
业界快讯 More
- 12-26 【5iMX新闻中心】卡勃力特发布6x6全轮驱动
- 12-26 品牌合作丨 Flysky&Sunpadow FS-ST8、FS-
- 08-15 航模行业新生力量!星奇世界发布 STARGAZER
- 10-26 FMS新品:1/12比例德国82型越野车
- 09-26 1:16 AVVX 验证型两栖战车中秋节正式服役

- 活动
- 精华
More
-

【5iMX评测室】卡勃力特新品K3364 6x6全轮
“前2后8”在当今依然是最主流最正统的自卸车类别。这种配置了3根车桥的自卸车,具有十分经济的装卸运载能力,深受业内人士的喜爱。 K… -

4K时代,大疆新一代穿越机图传套件O3 Air U
4K FPV过去只能挂GoPro或者OSMO Action,不仅笨重,而且麻烦,现在大疆全新一代4K画质的O3 Air Unit终于来了,与之搭配的还有Avata上面那套… -

史上最“耐炸”的无人机——大疆Avata飞行
玩过模型和无人机的朋友都知道什么叫“炸机”。几乎没有哪款无人机敢说自己耐炸,这不,大疆就发布了一款非常耐炸的无人机Avata(暂时没有…
-
斯普林格顶推小拖船
重新画图斯普林格顶推船 长度57厘米拼装结构。废话不多说上制作步骤图片 … -

塞斯纳182像真套材
组装过程 … -
我也来做一架山坡滑翔机
第一次做轻木滑翔机,可是鼓足了好多好多勇气才开工的。以前总听前辈说,轻木滑翔机不比练习机和像真机,要求即轻又要相对结实,翼载荷又要 …
阅读排行 More
-
01
大嘴鸟整机换新衣服
由于大嘴鸟炸机,机头损坏,修复过程 ... -
02
看同学装京商Flip25+OS 40FP
另一同学之前从tb店家购得库存一Flip2 ... -
03
斯普林格顶推小拖船
重新画图斯普林格顶推船 长度57厘米拼 ... -
04
塞斯纳182像真套材
组装过程 ... -
05
pl18摇杆干涉
如题,pl18摇杆下边是个六角螺母,左 ...
 /1
/1 
