作者:vidct

如果您对ScaleART的板车感兴趣,想深入了解德国板车的组织和组装过程,以及隔空体验德国人是如何把板车也做得如此精细,那么就请跟随我的镜头去了解吧!这真的是一次难得的机会,因为到目前为止,我还没有见过有比我做得更详细的德国板车装车过程!

第一章 车轮轴的安装

这是车轮轴的安装过程。

接着最的枯燥任务就是安装这些减震板

转向桥的减震板装完了

现在安装直桥

直桥有3条

准备装配!这个工序比较枯燥,都是重复操作。

4条车桥全部装完减震板

为转向桥安装上车轮

再安装上转向连杆

车轮的安装步奏再详细为你展示

轮毂、接合器、螺丝、装饰盖、轴承2颗

把车轮总成安装到车桥上

盖上结合器的装饰盖

完成!
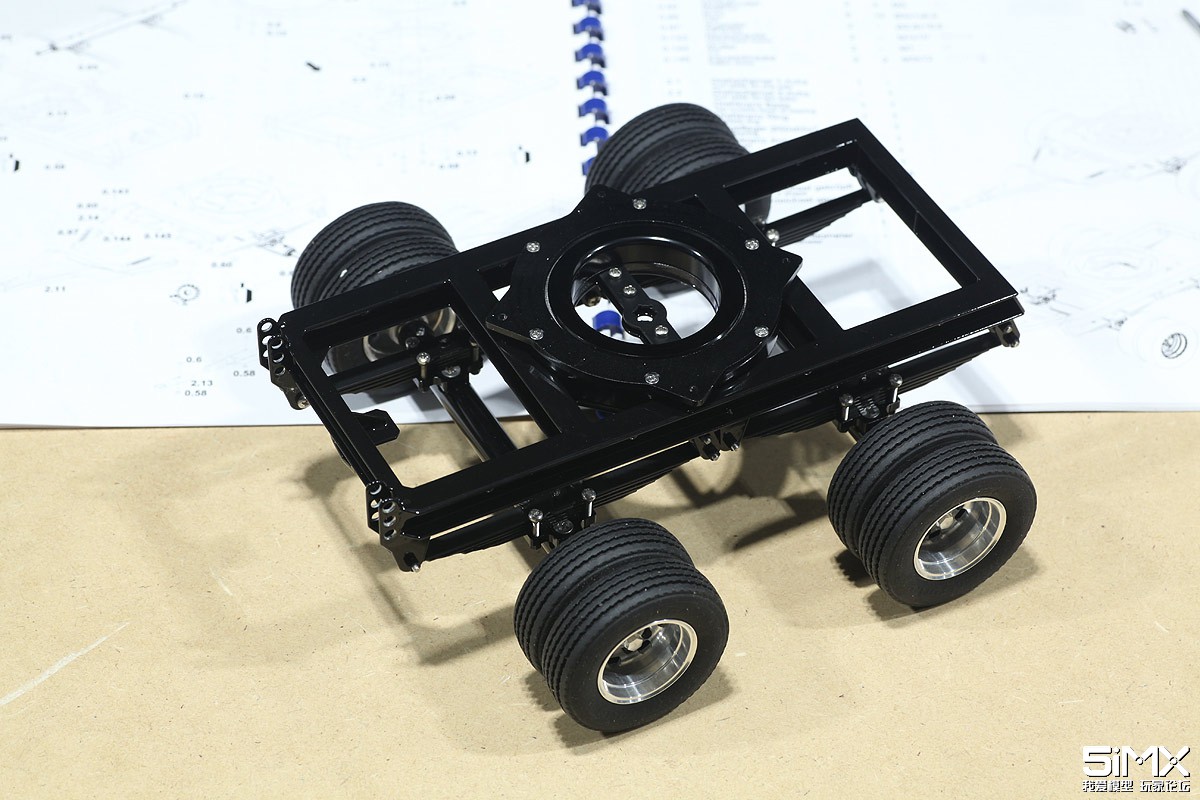
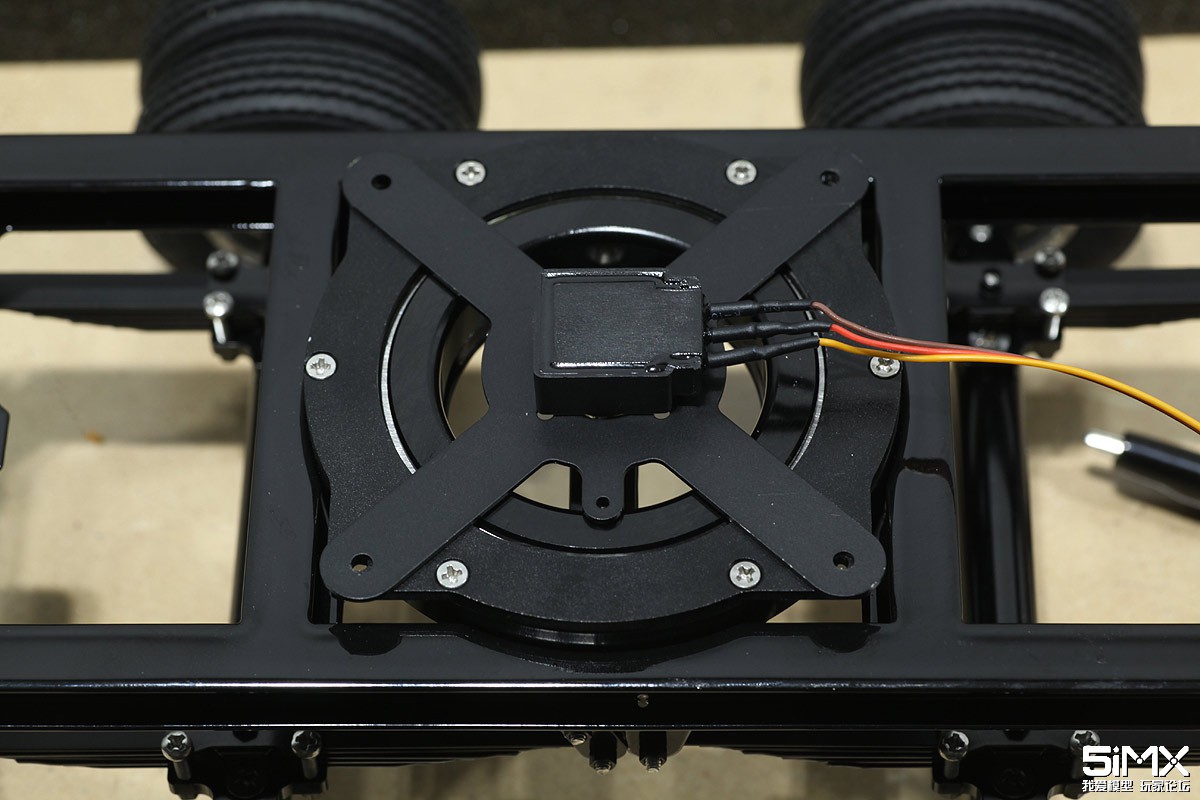
第二章 转向架的安装
平板拖车是挖机、装载机、工程车的主流转运载具,它的结构相对于其他工程机械来说要简单一些。被模型化之后,表面上看起来也更为简单。不过ScaleART的平板拖车依然保留了许多的细节,让它的仿真度更高。当然,细节的增加,也必然会增加组装的难度。想知道德国人是如何把一个本可以简化的东西仿真化的吗?那么组装一台ScaleART的模型一定会令人印像深刻。

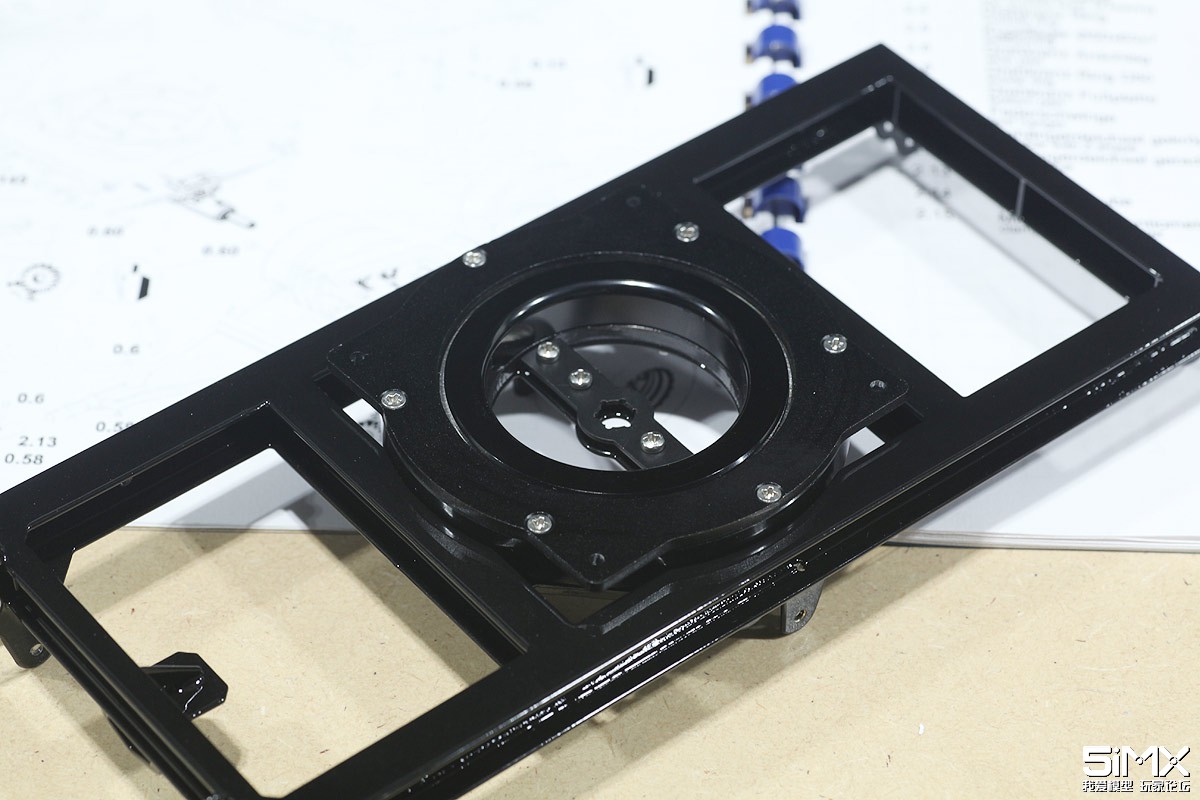
这是两轴转向车架的主要零件,材质全部是金属的。

先固定大轴承的限位器
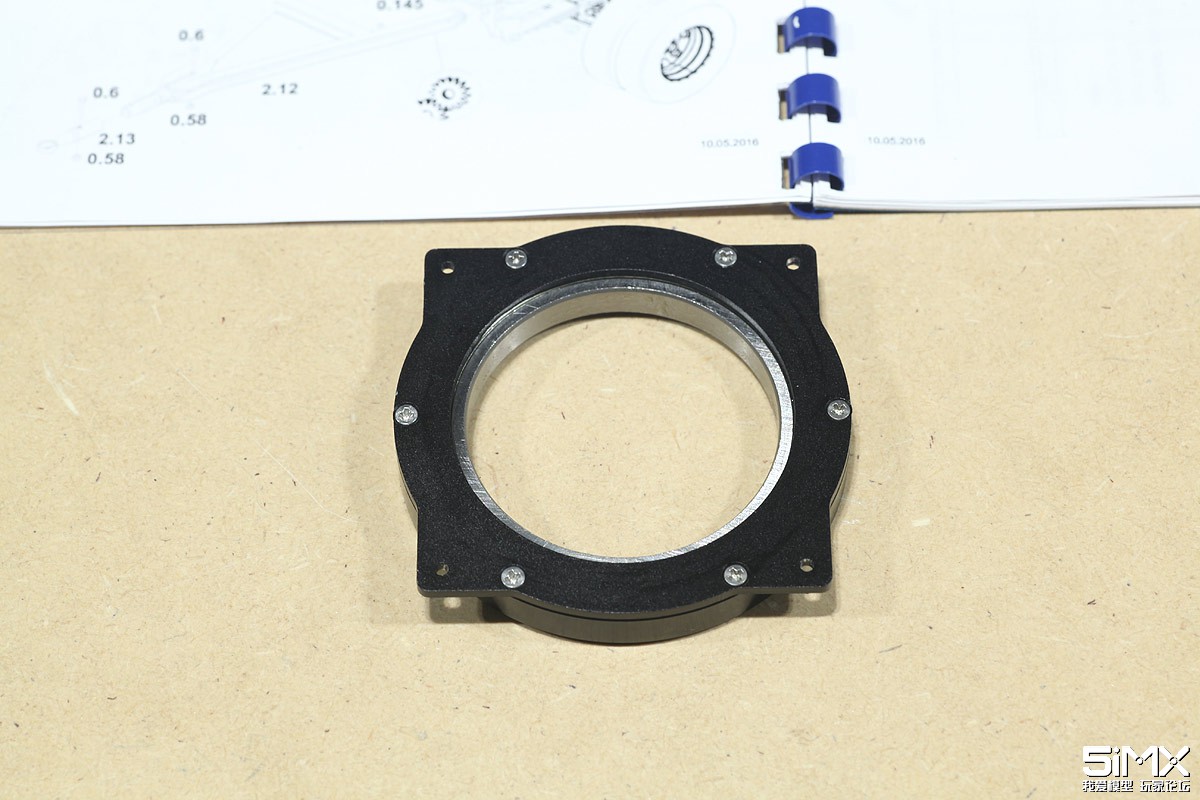
再安装大轴承的转换连接板
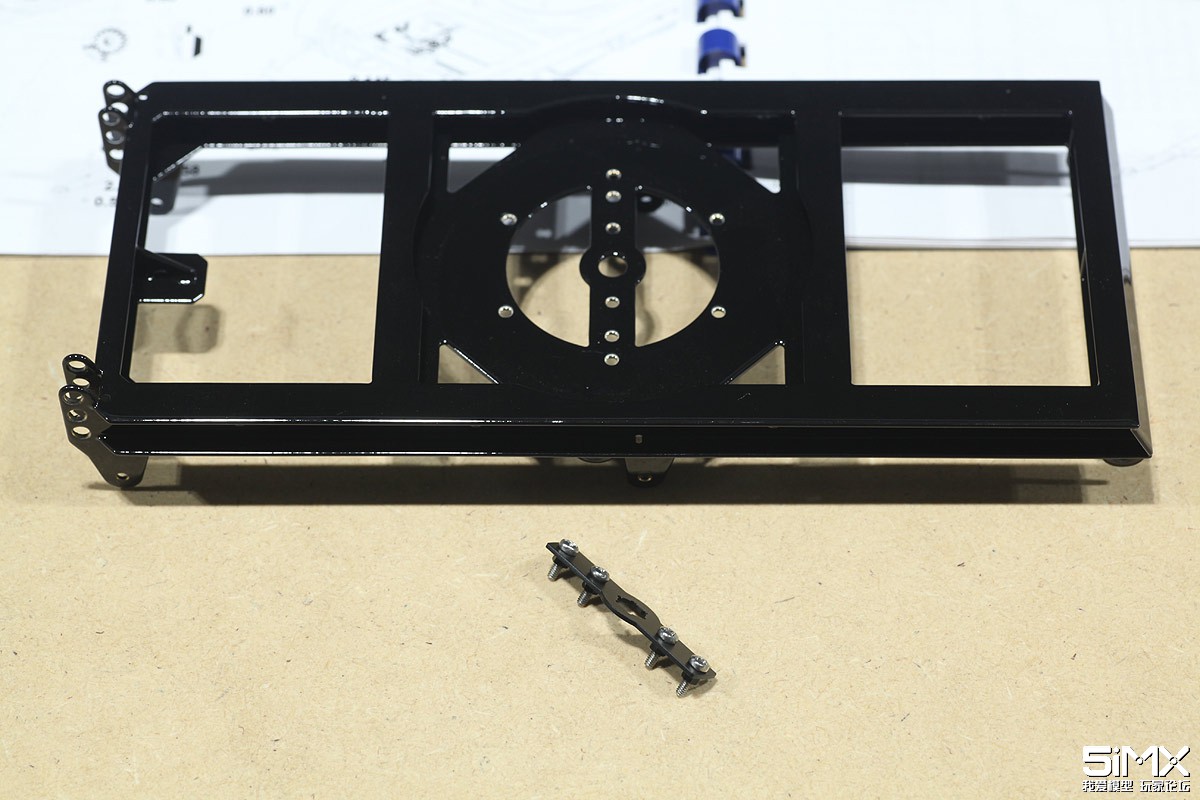
然后安装这个位置传感器的接触片
这个零件只有带有随动转向功能的板车才有
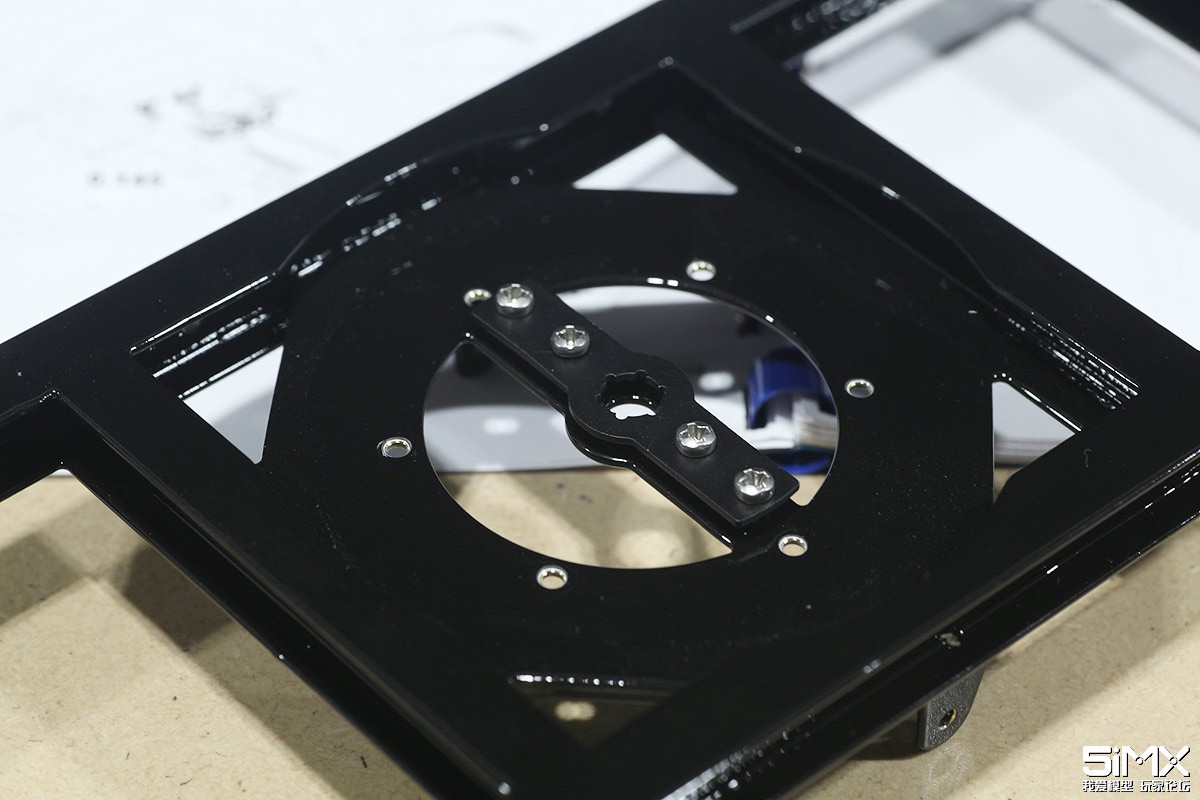
装好之后就是上面这样
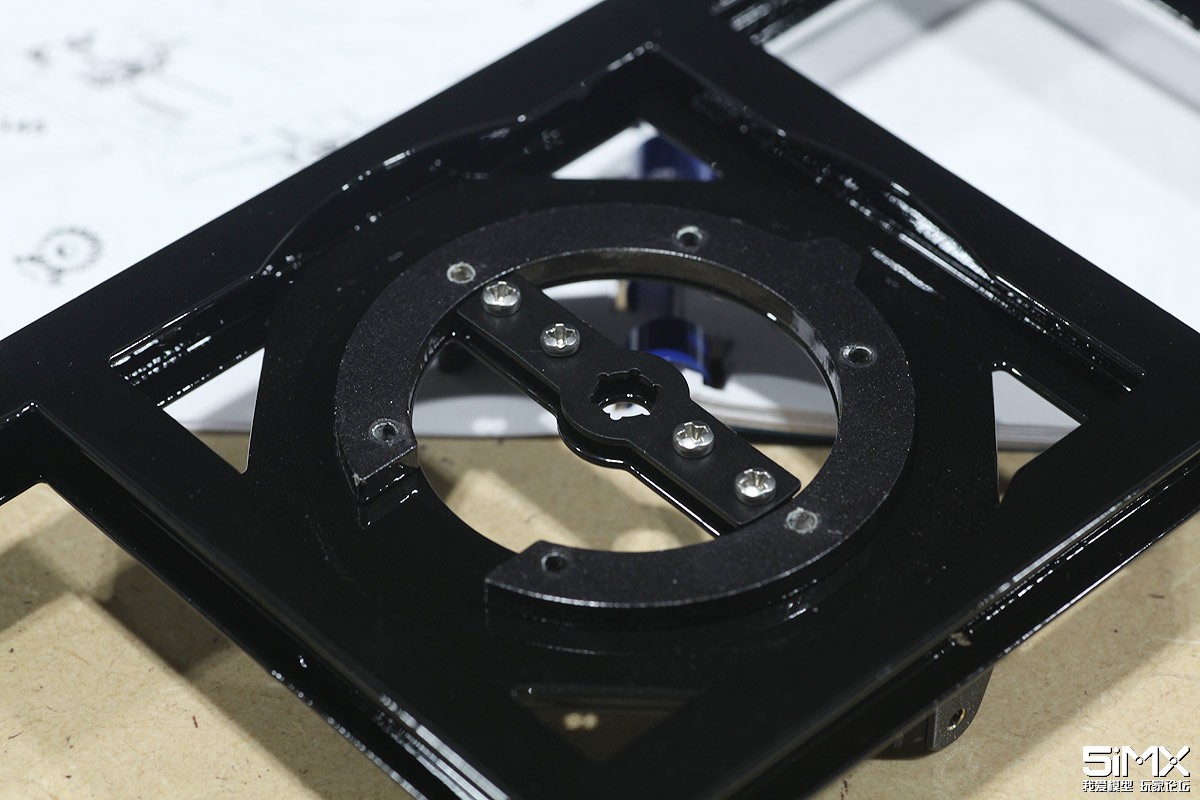
然后安装垫片
再安装旋转中心环
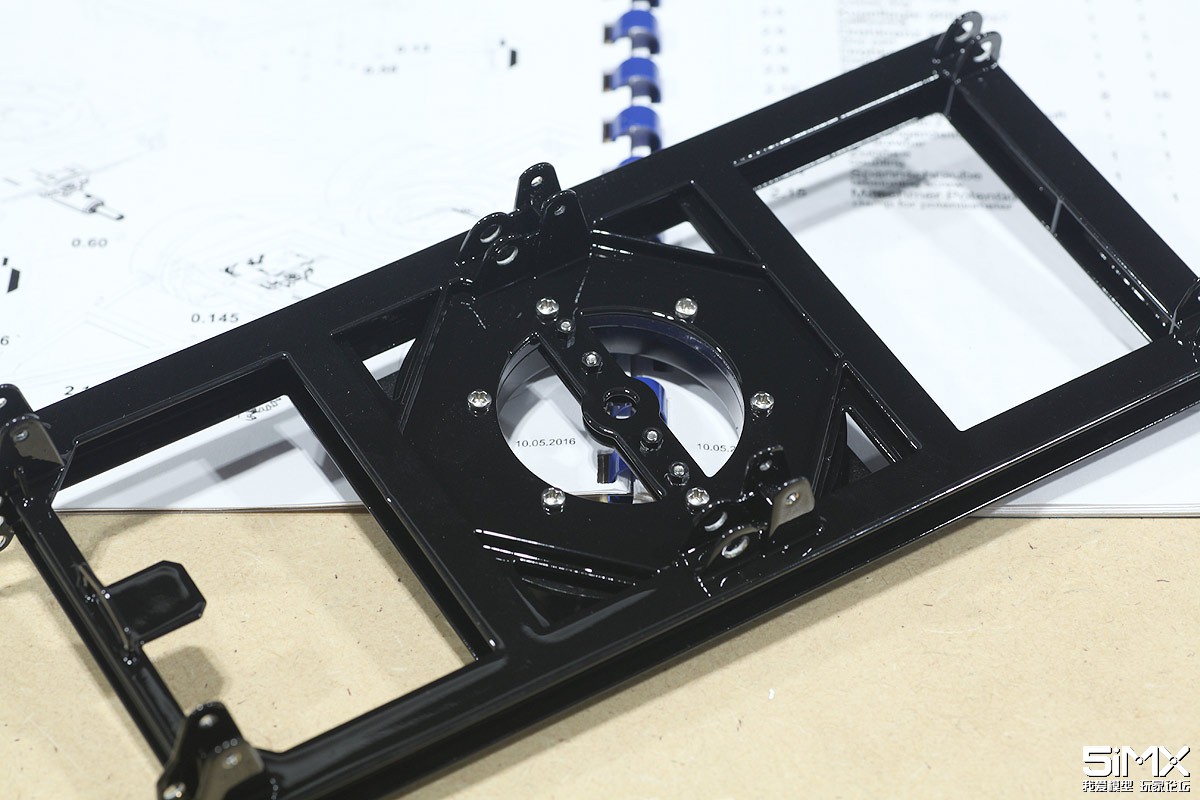
最后一步
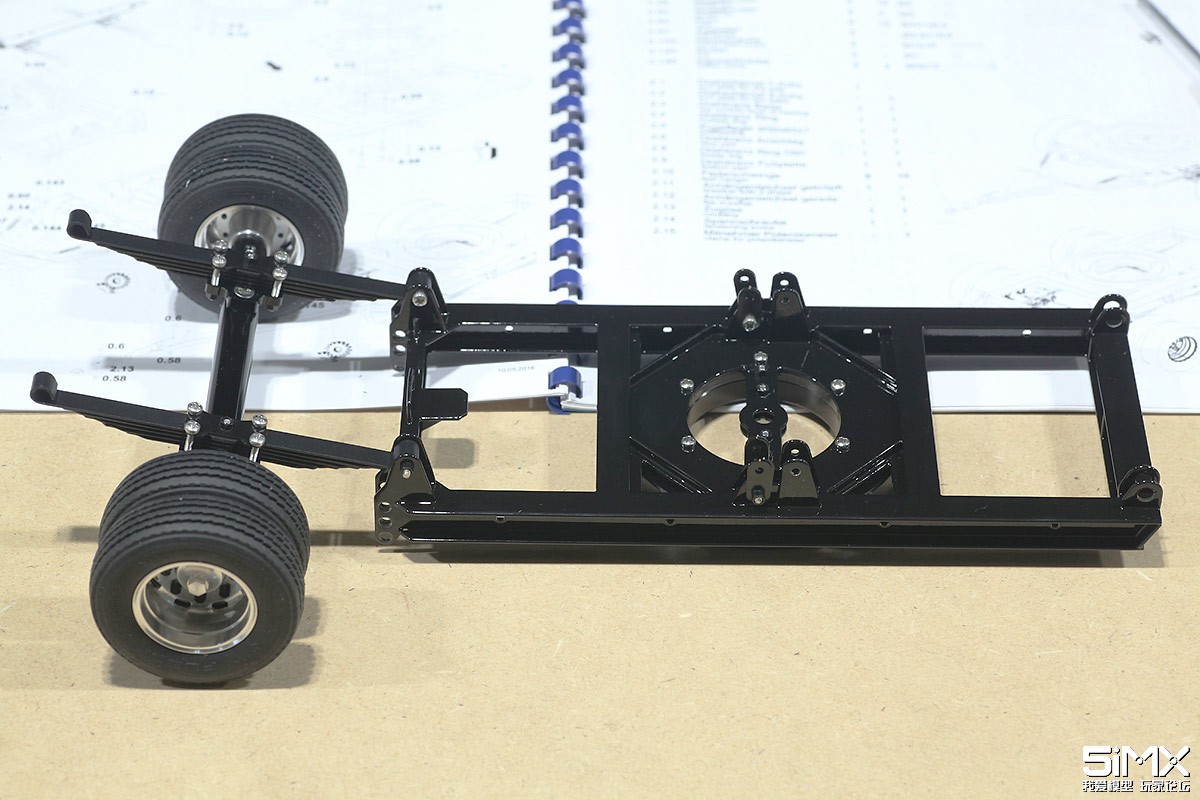
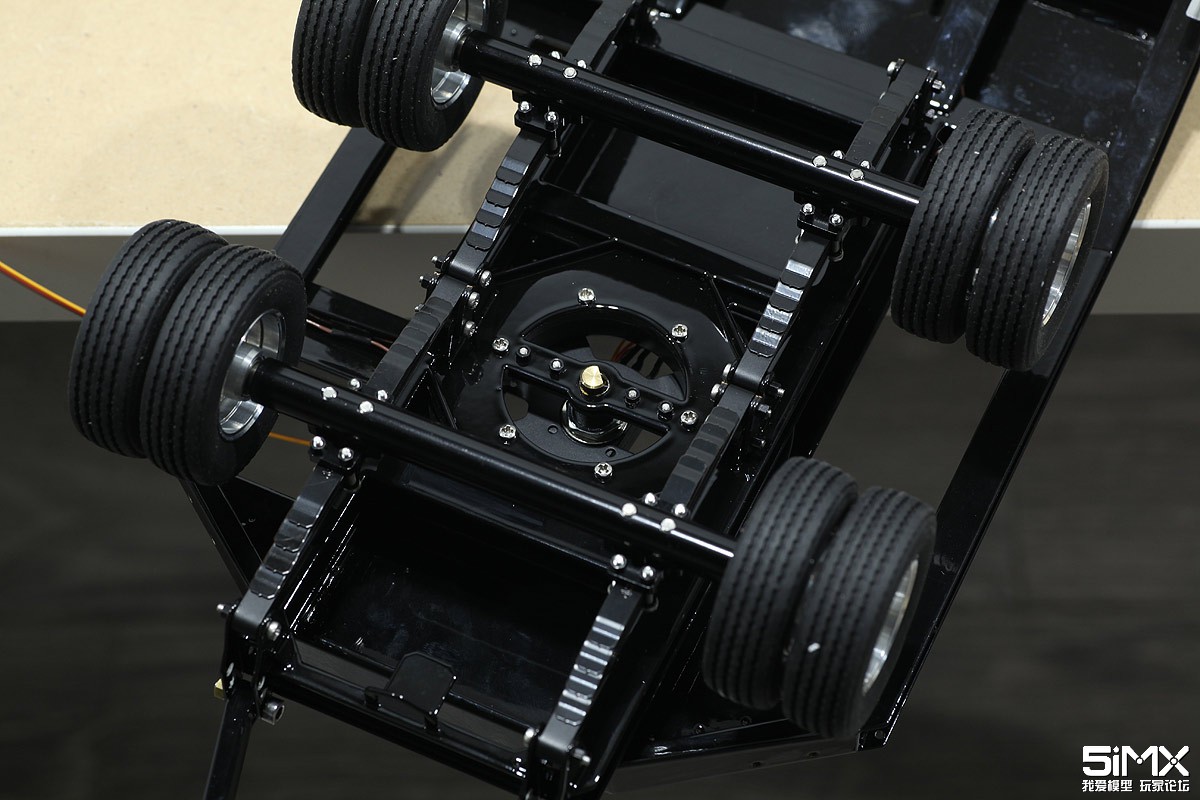
安装车桥
车桥+减震板总成在上一节已经组装好了
所以这里直接和车架固定起来就完事,很简单!

装好第一个车桥
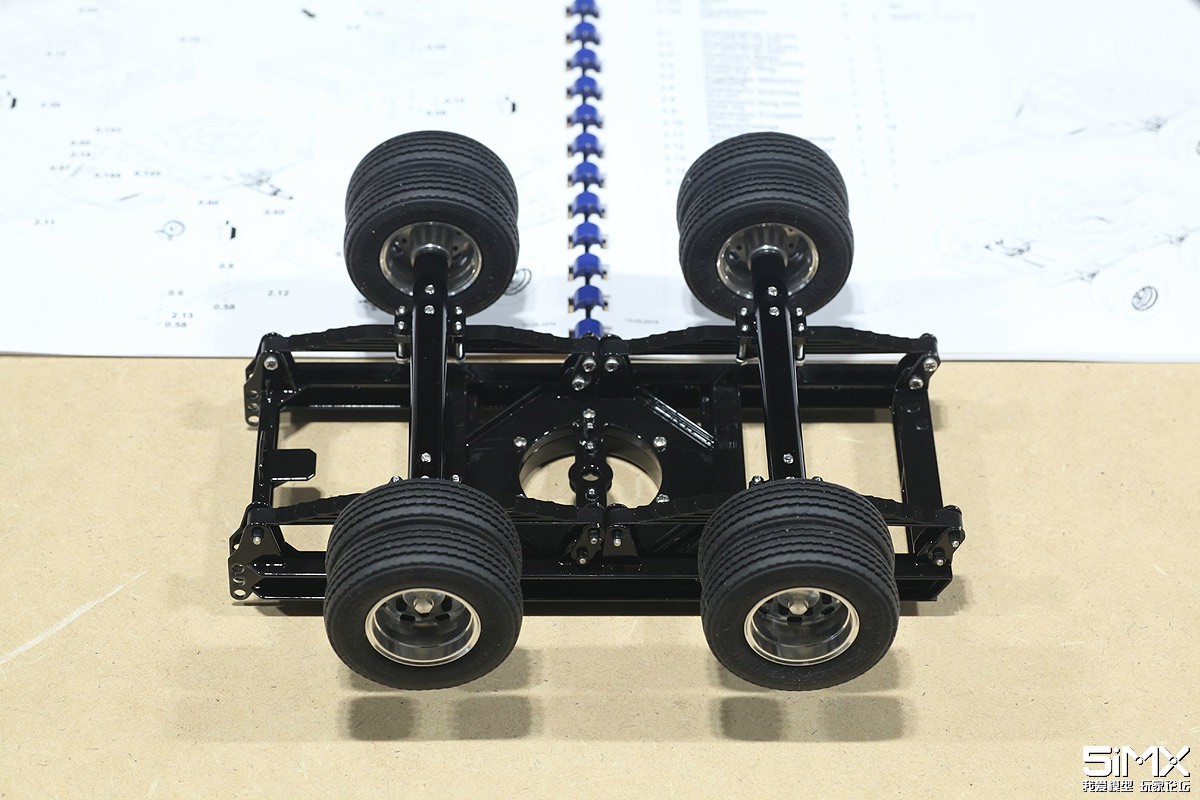
两个都装好了

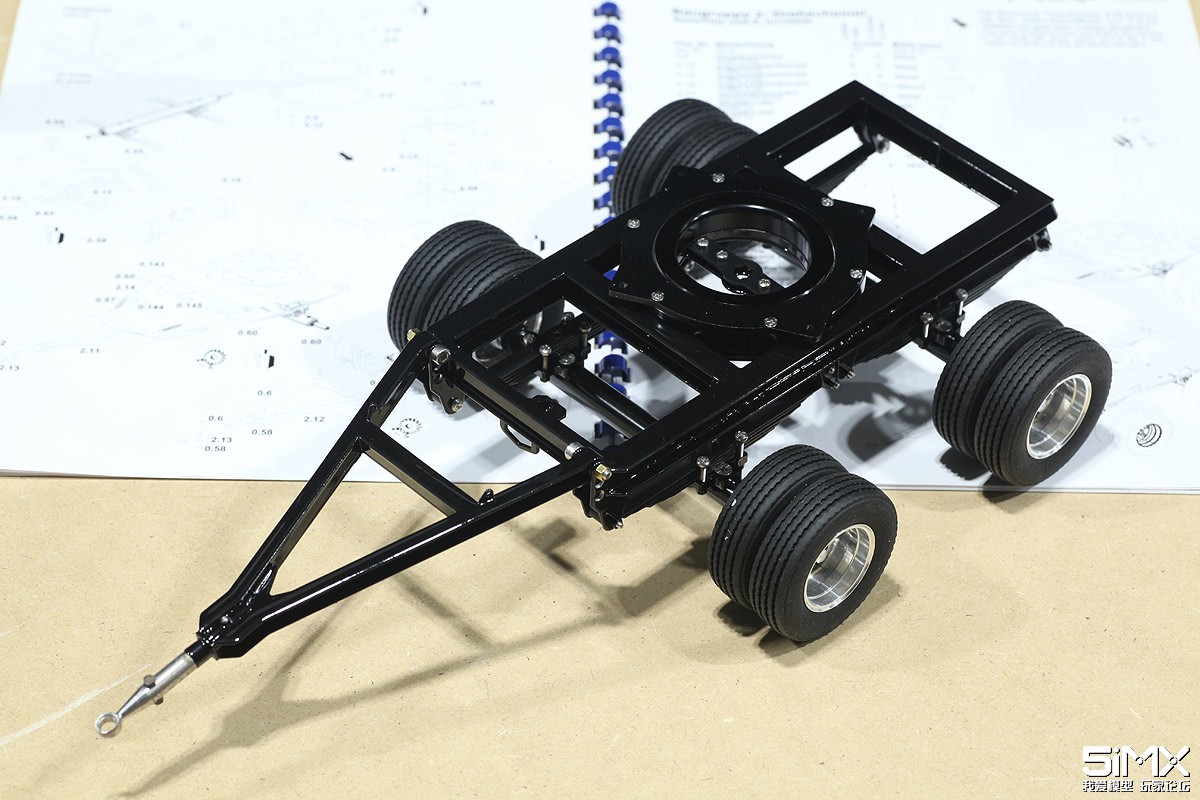
安装牵引拖钩
安装宽度扩展支撑架
准备安装侧护栏

侧护栏和宽度扩展架都安装完成了
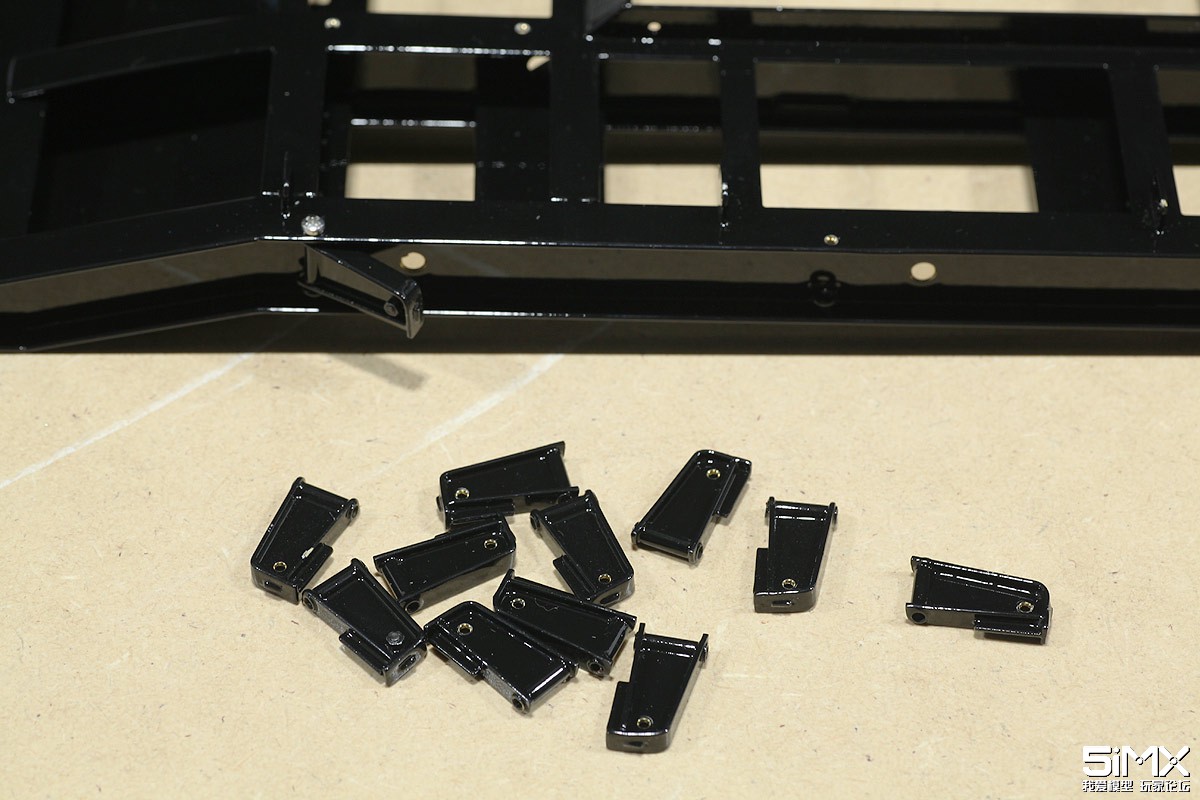
安装悬挂吊耳

准备安装尾灯组

尾灯模块
准备穿线固定
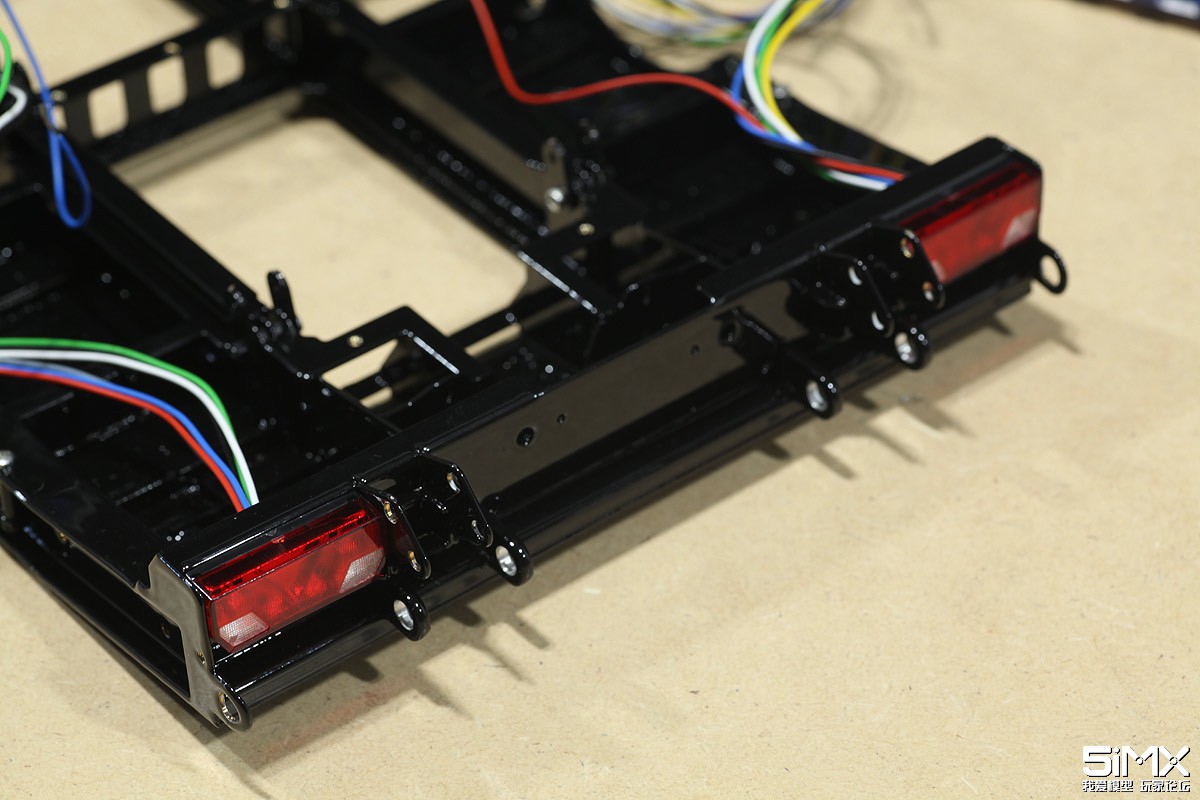
完成
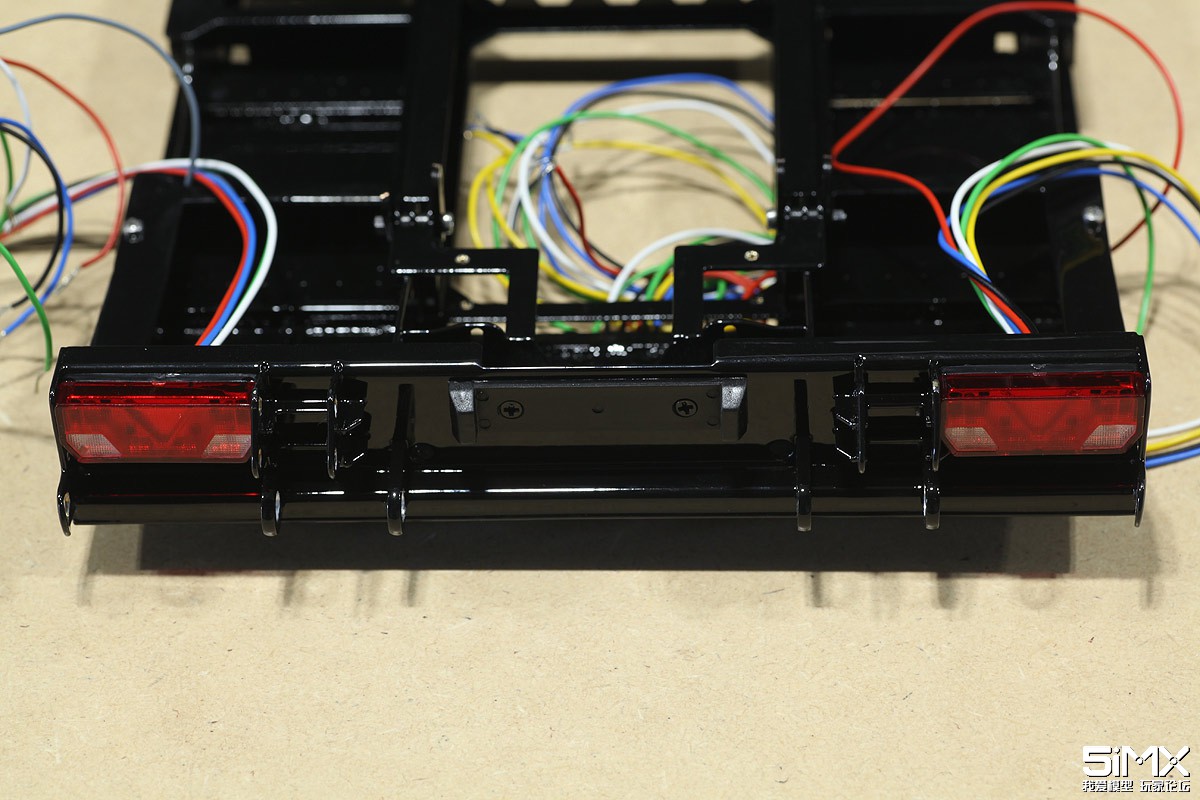
安装好牌照架
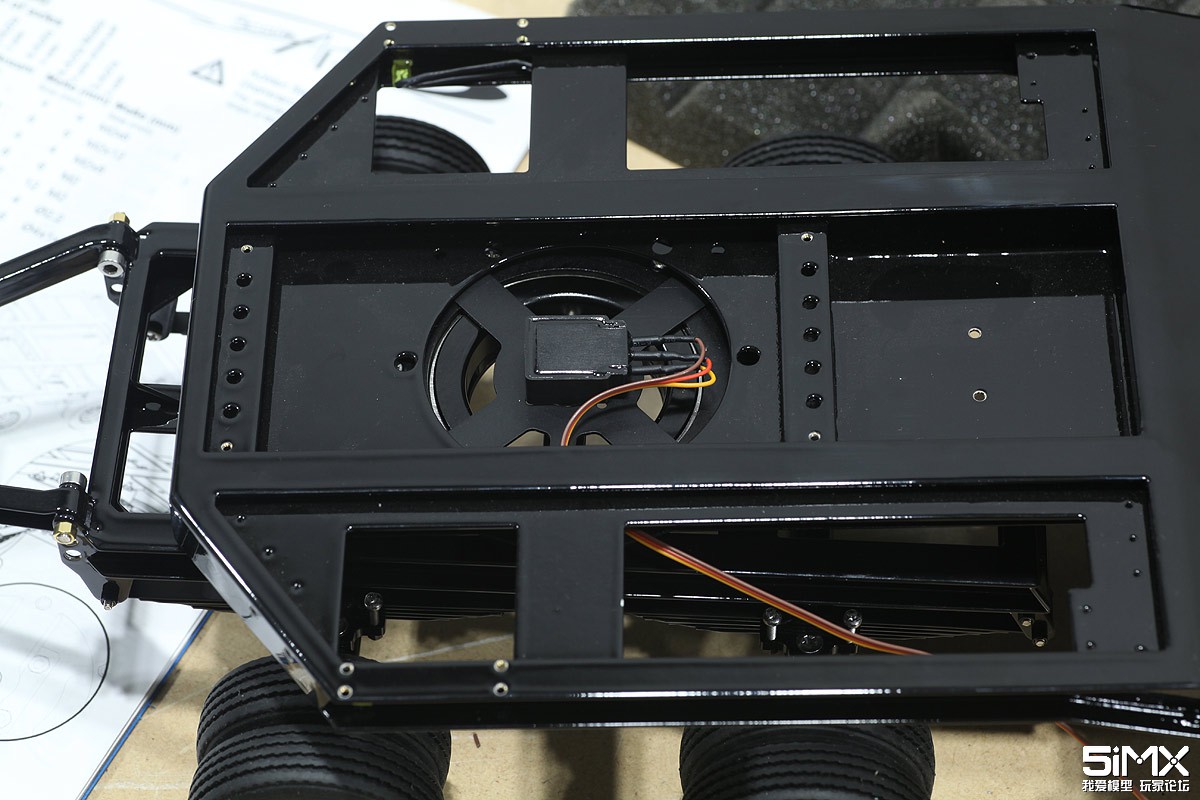
第三章 拖车板的安装
ScaleART的设计主要强调的是细节。一个细节就是一个价值,一个价值就是一项成本。当我们看到玩具化的模型时,其实它们背后的涉及逻辑是把原本细节省略省略再省略,从而降低成本。当我们看到艺术化的模型时,它们的设计逻辑是保留细节、还原细节、欣赏细节,当然成本就变高了。接下来我将要开始装调ScaleART平板拖车的电路部分。电路部分的难度主要涉及到布线和调试。布线不仔细考虑就会破坏整台车的艺术感。调试不到位,功能就不能完善的实现。这些都是很大的挑战,难度不小,远胜于组装一般的攀爬车。
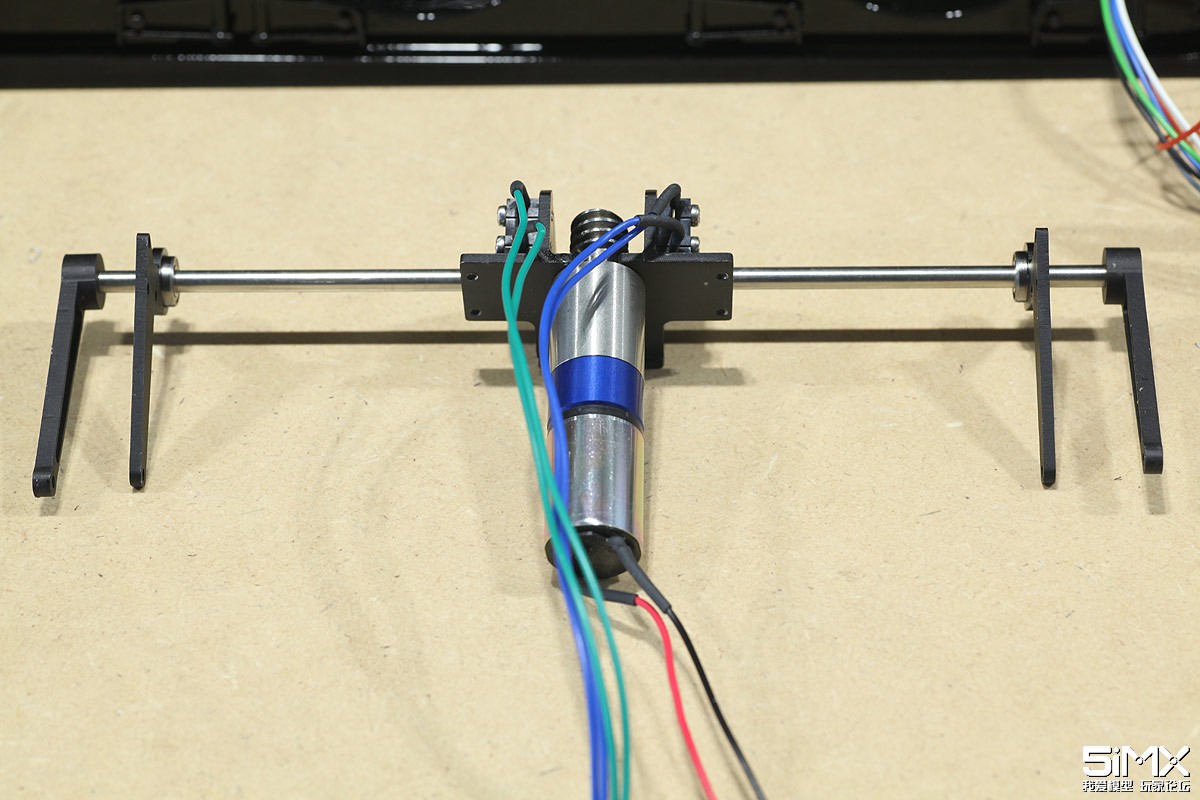
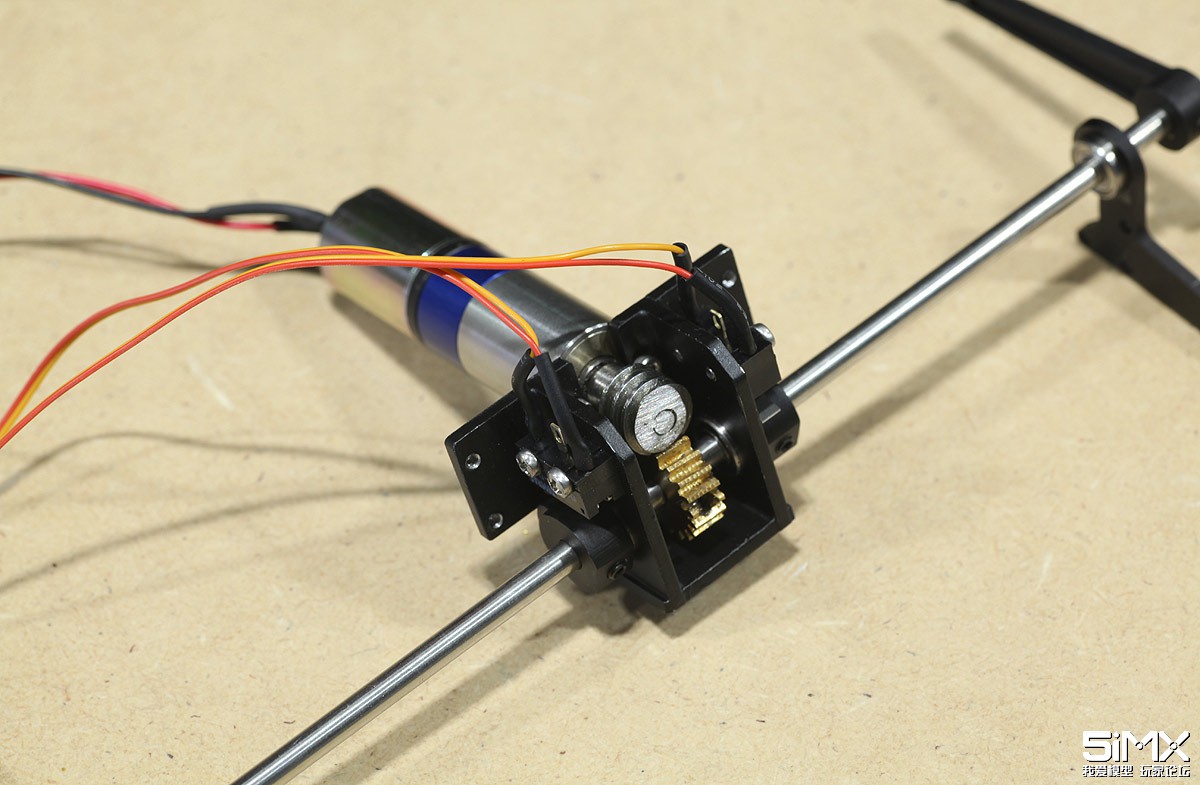
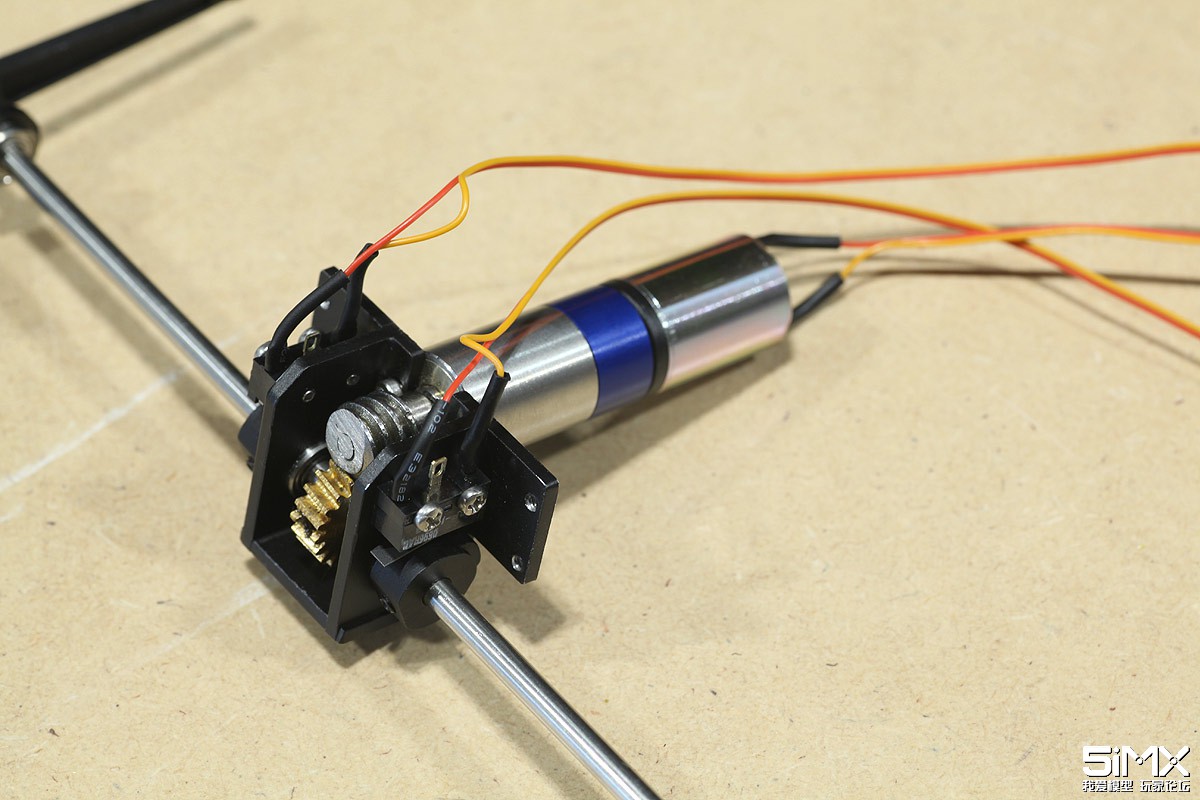
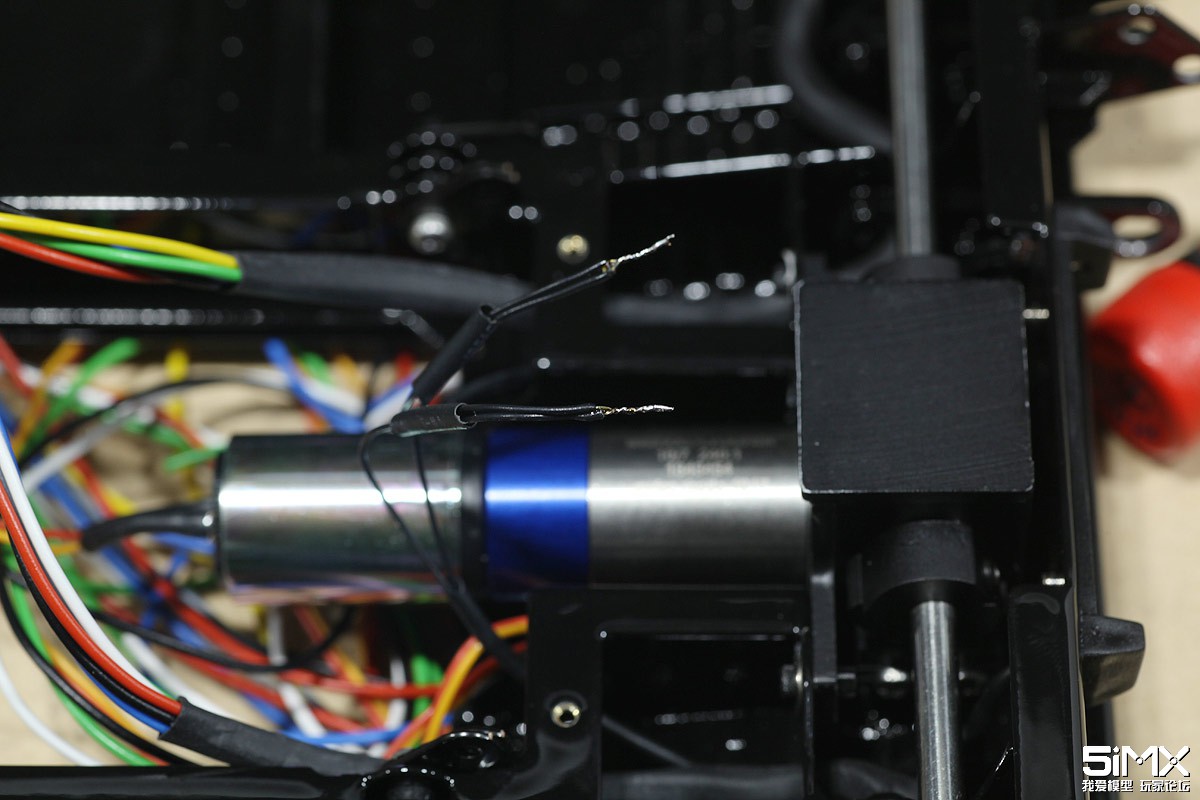
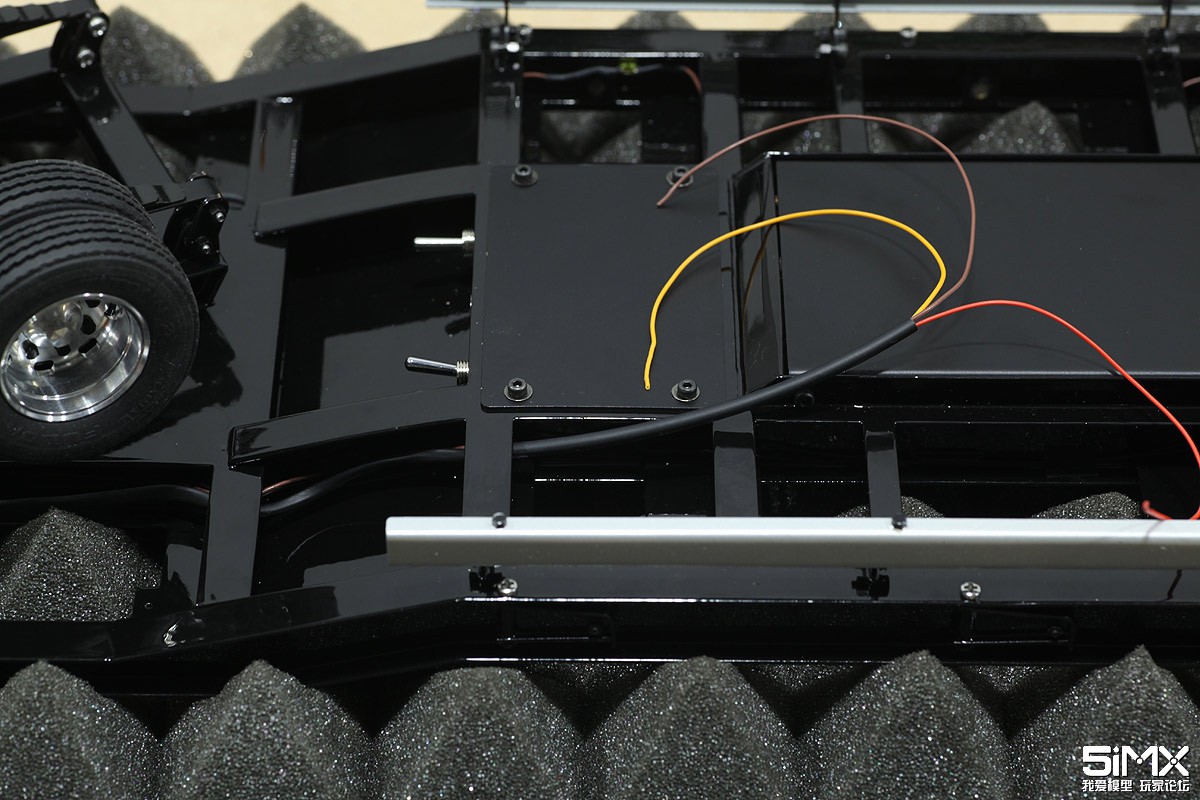
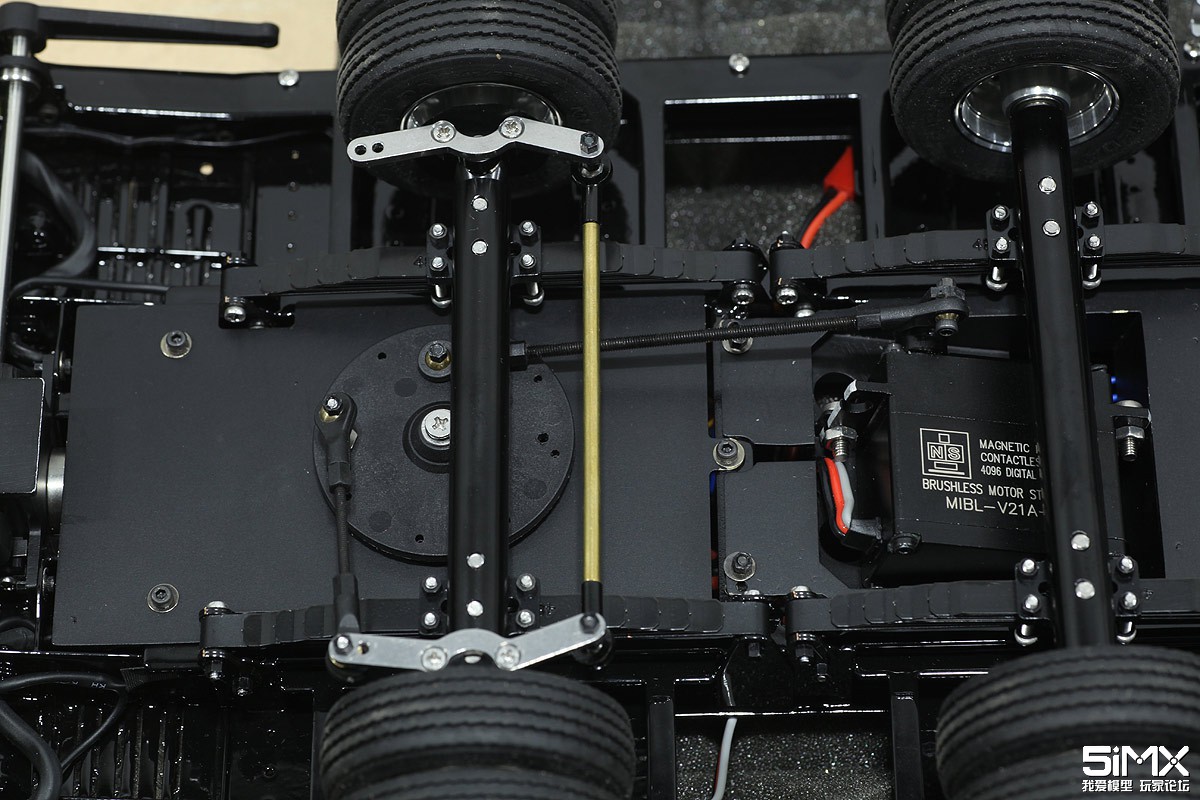
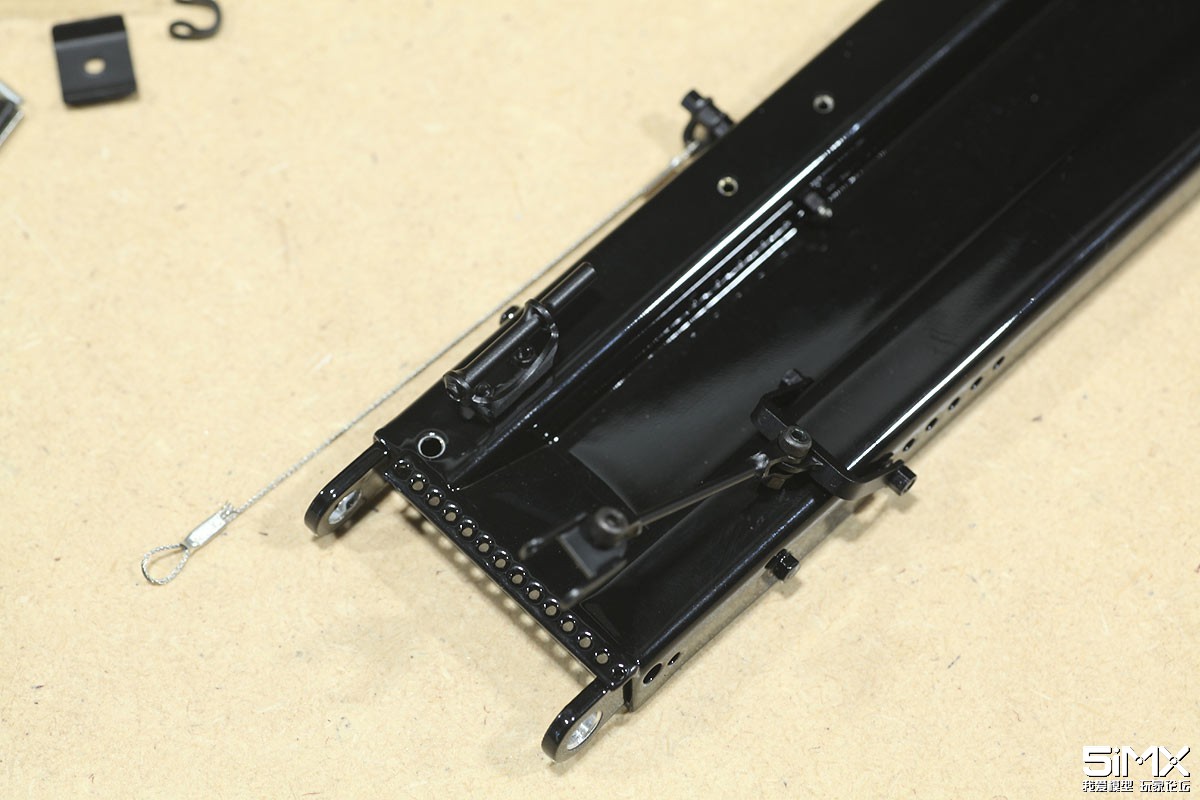
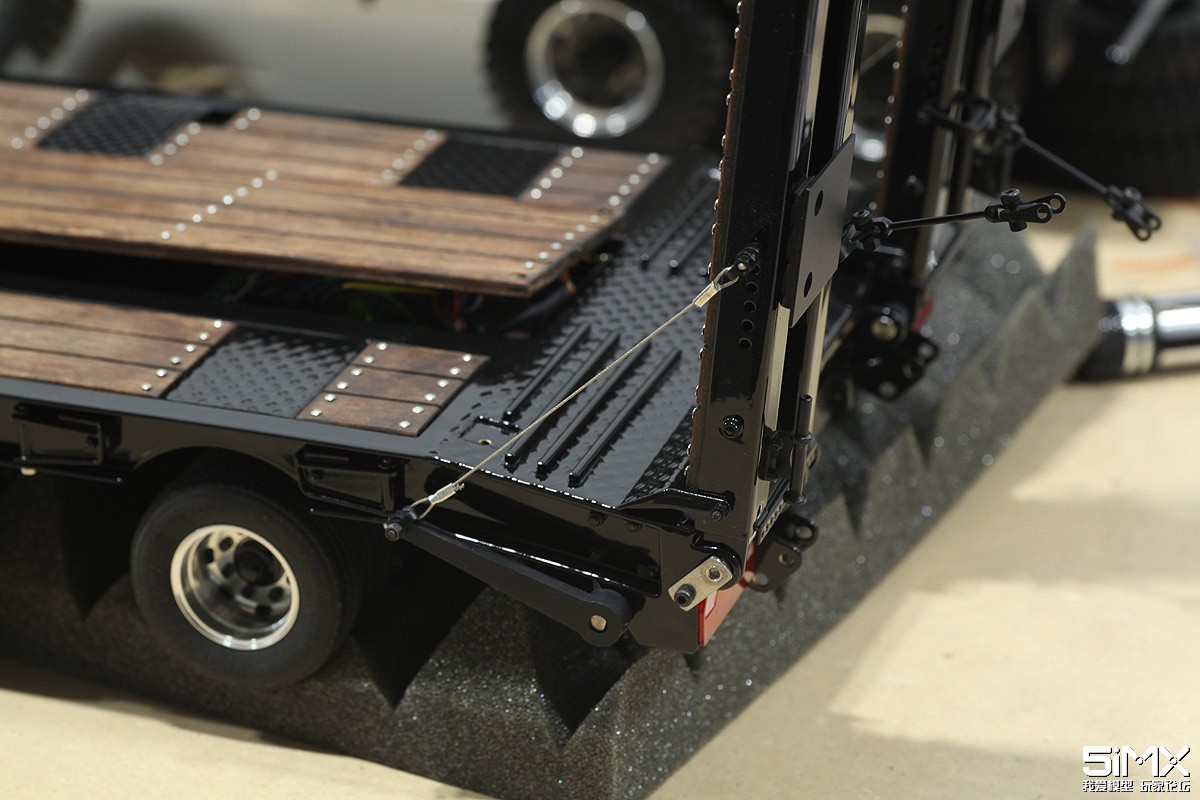
这是尾滑板的抬升装置,由电机驱动减速器,再通过蜗杆齿轮驱动。
并有限位器,可以调节起始点和终止点的角度,当然这个功能需要控制电路的配合才能实现(后文有详述)。
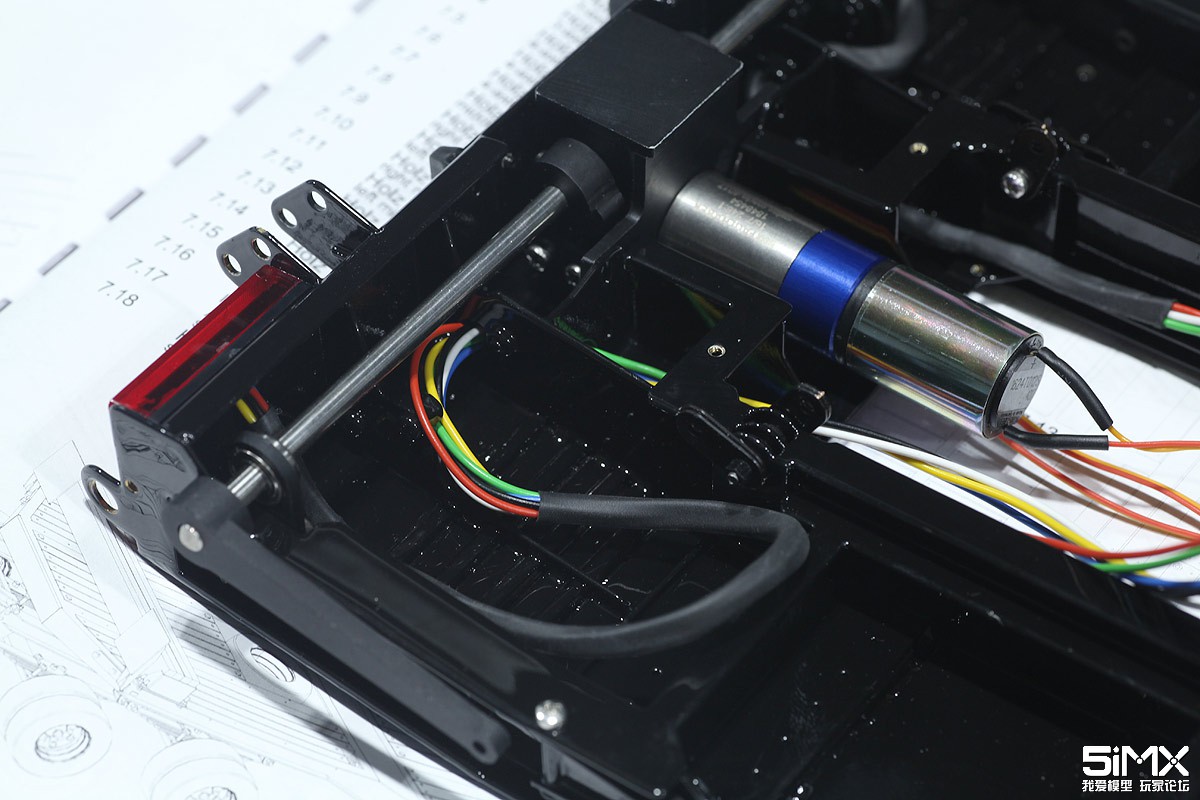
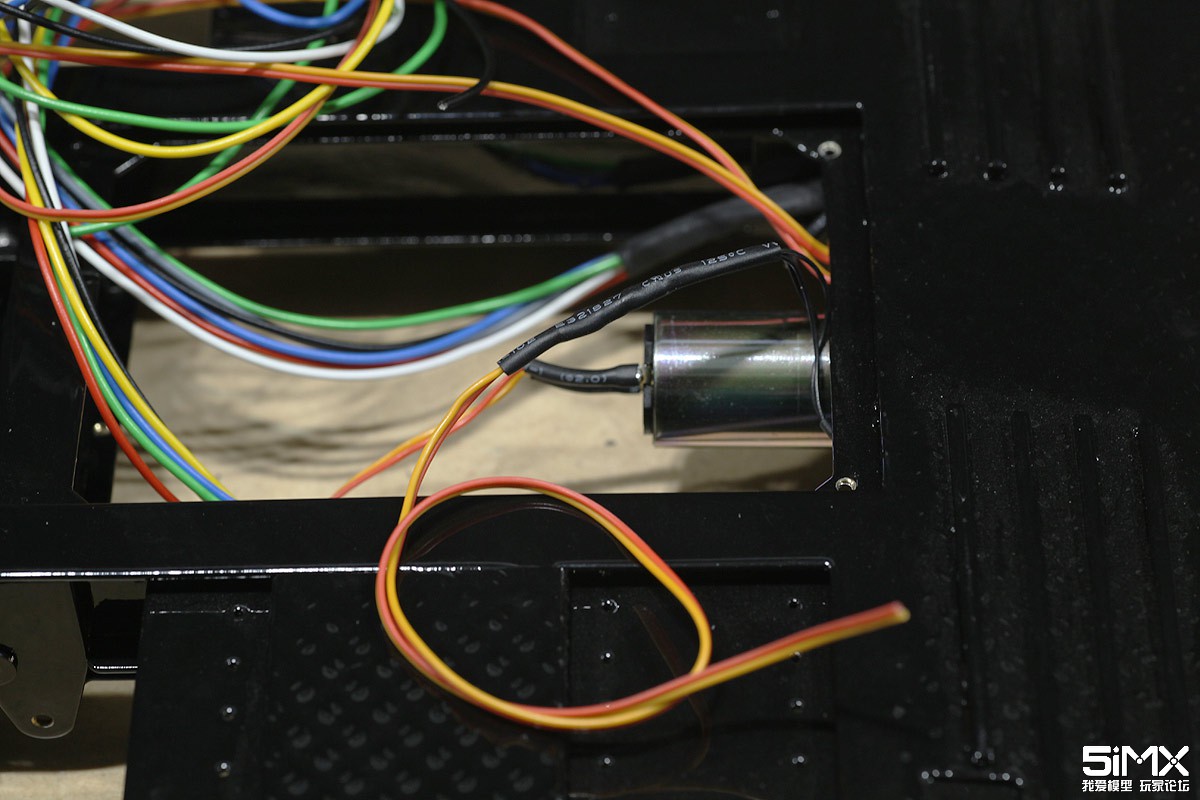
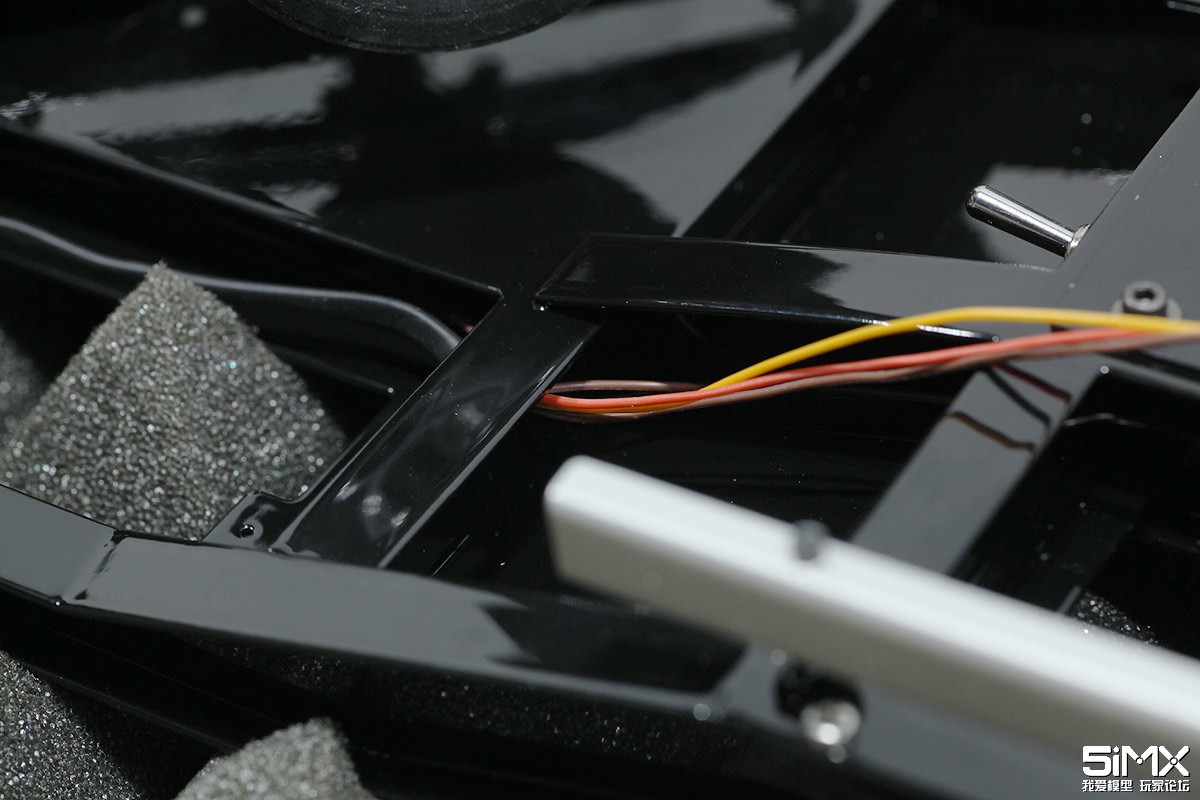
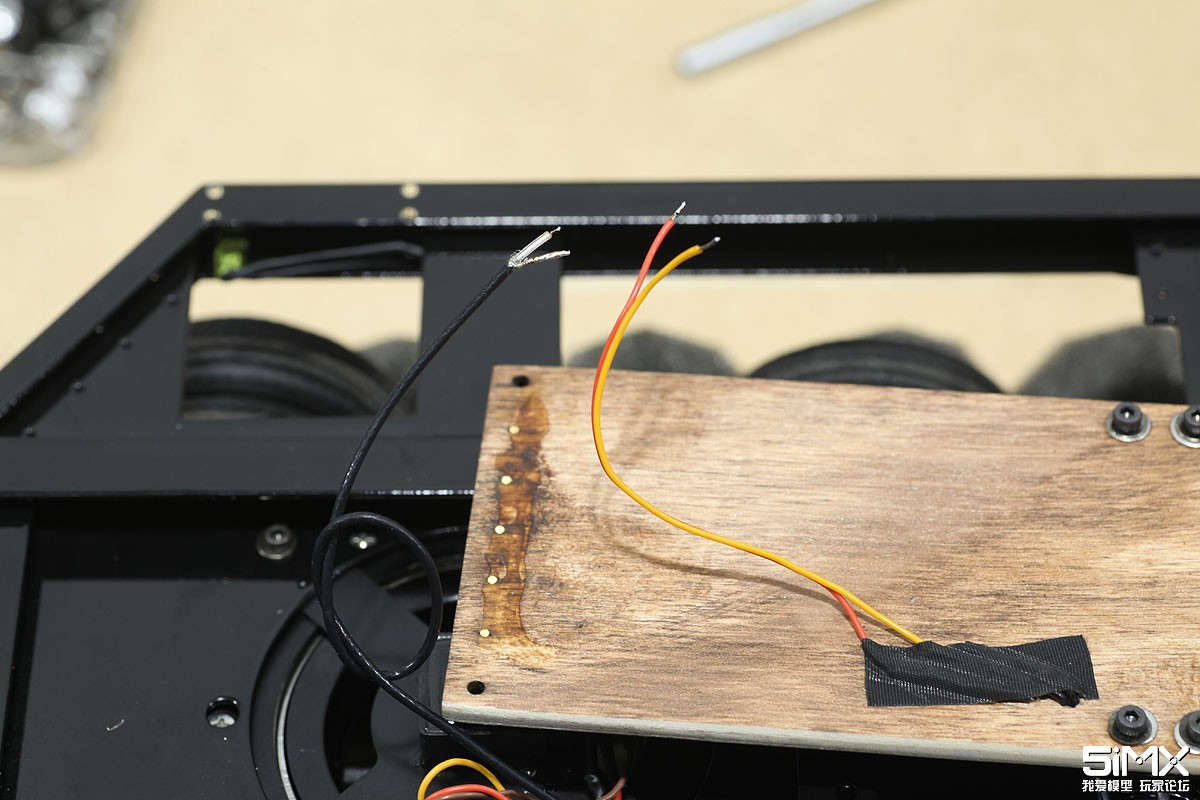
为了布线美观,首先我把电线现换成了细线。
这些细线更利于隐藏,质地柔软,便于布置。
这些器件的功率并不大,所以用细线是足够的。

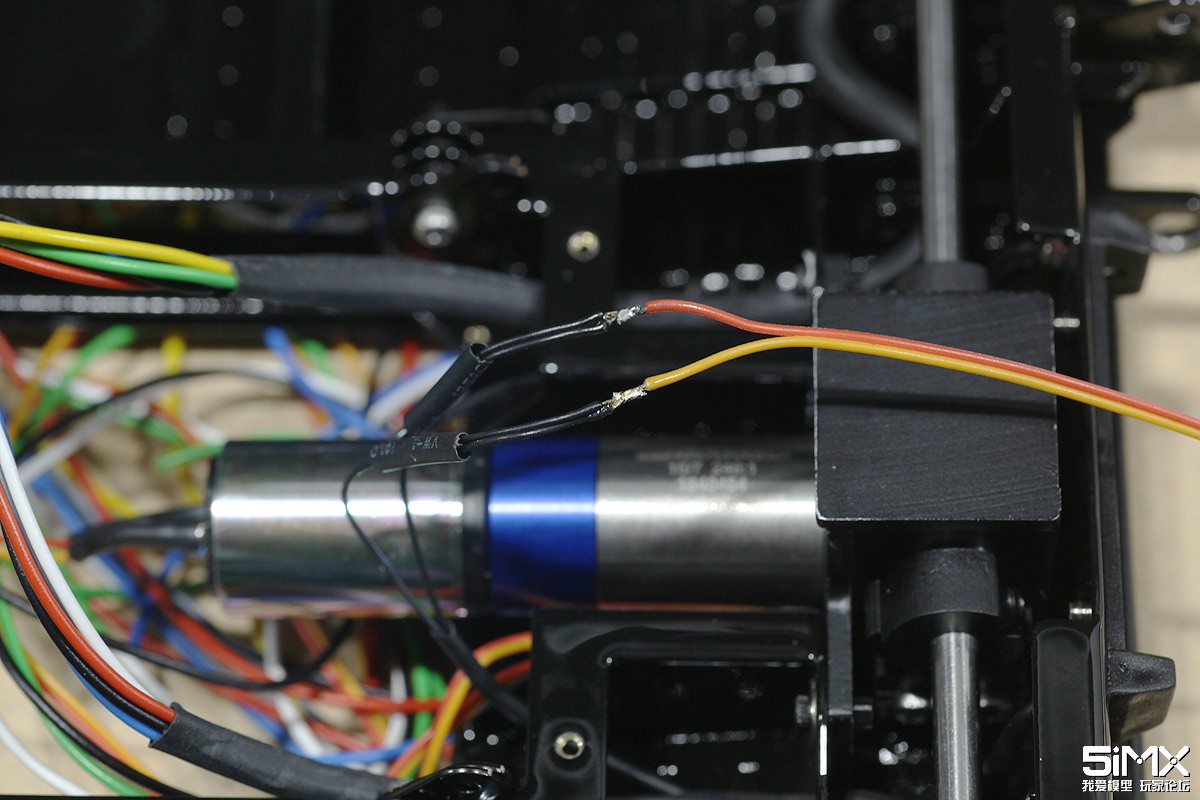
硬件安装到位
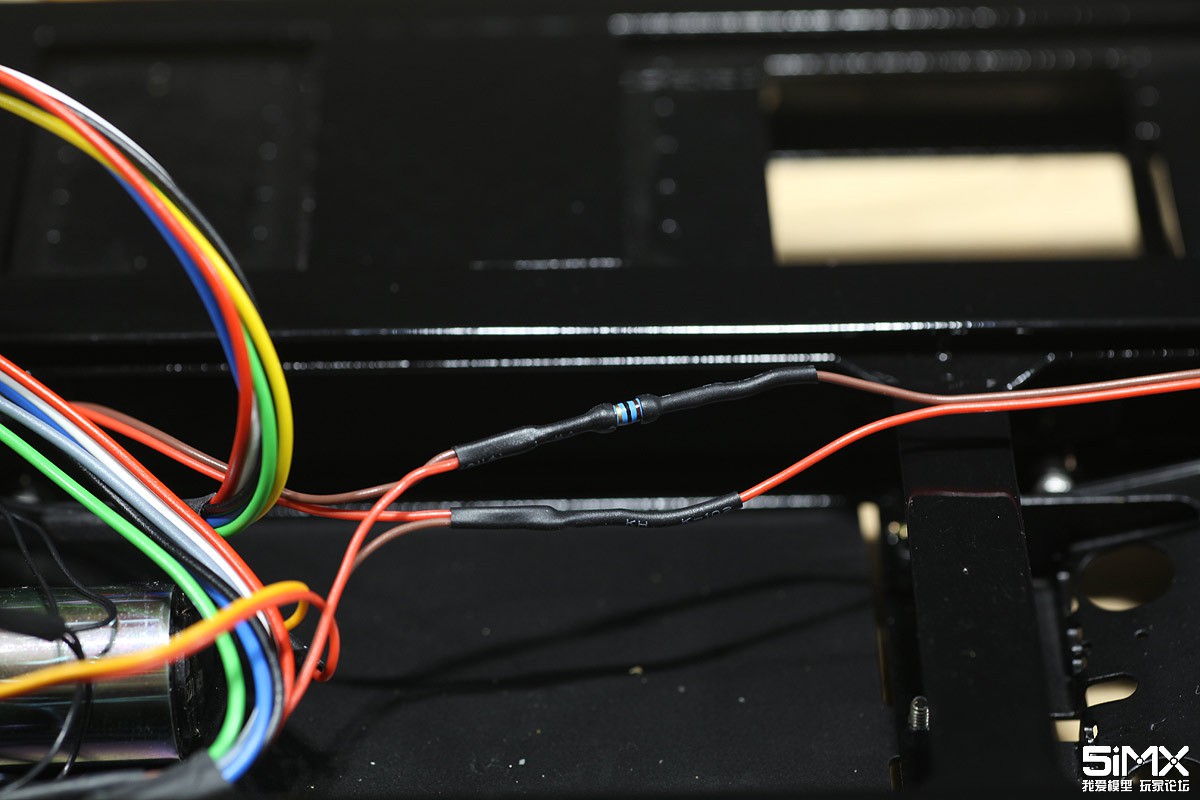
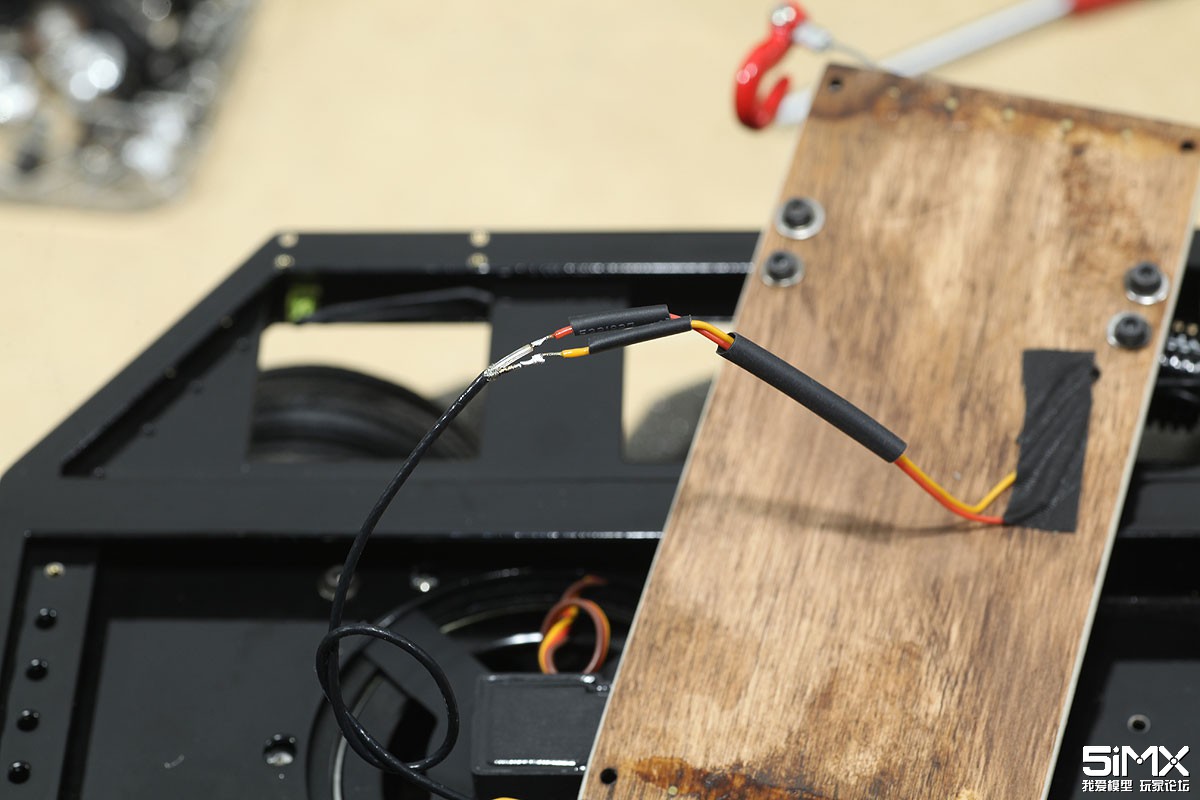
尾灯线穿热缩管进行“黑化”隐藏。
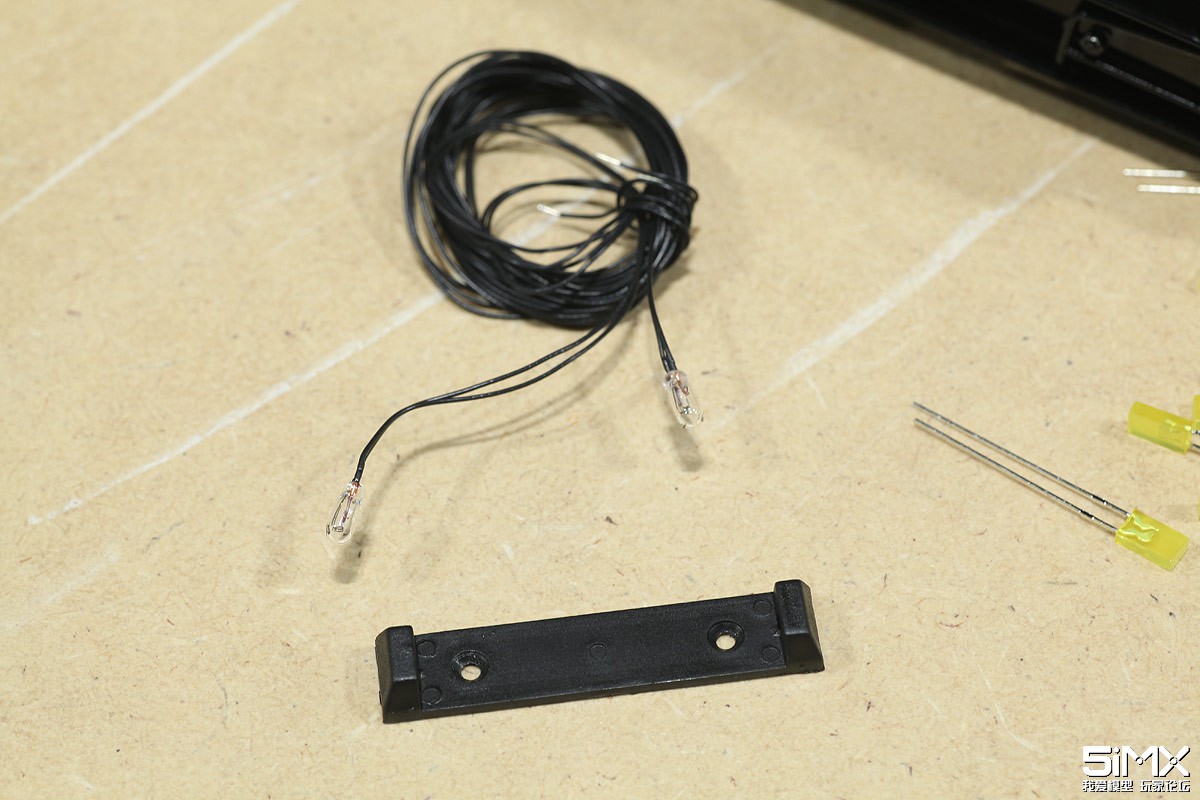
这是牌照照明灯

试装
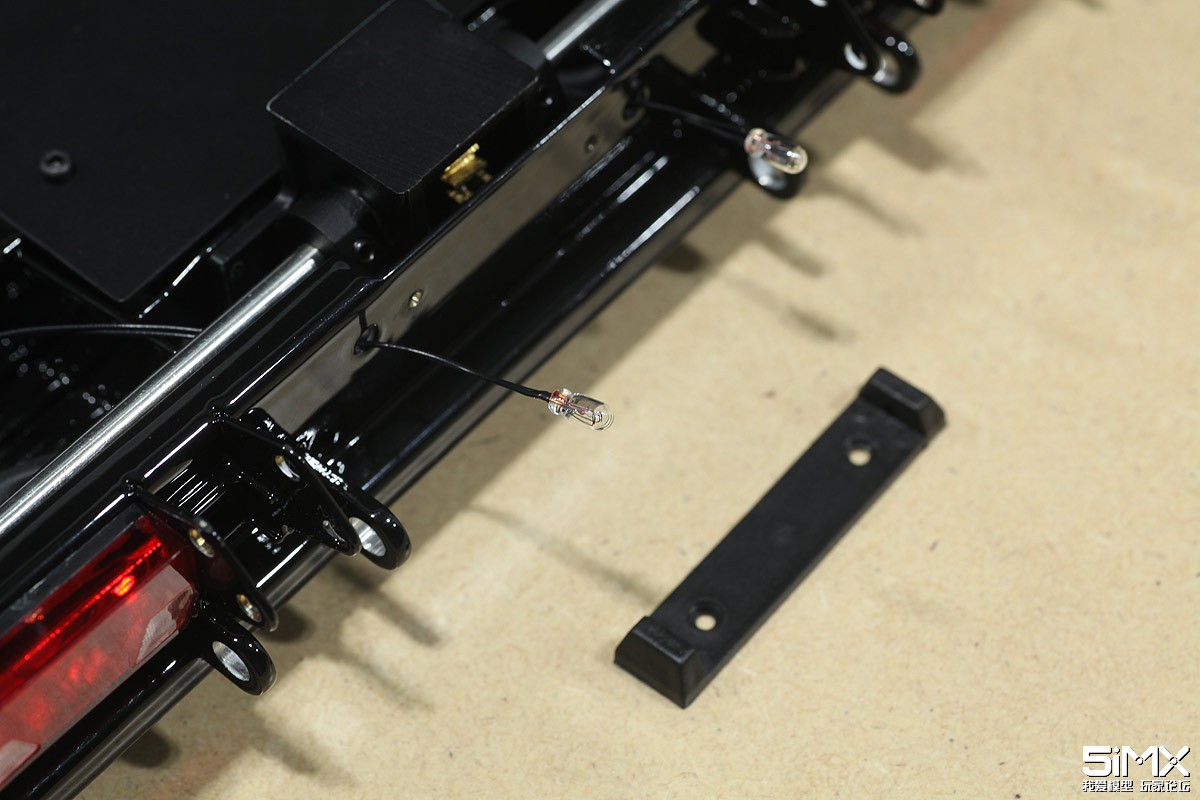
装车
牌照灯布线
两灯并在一起,四线变两线。
穿到板车正面
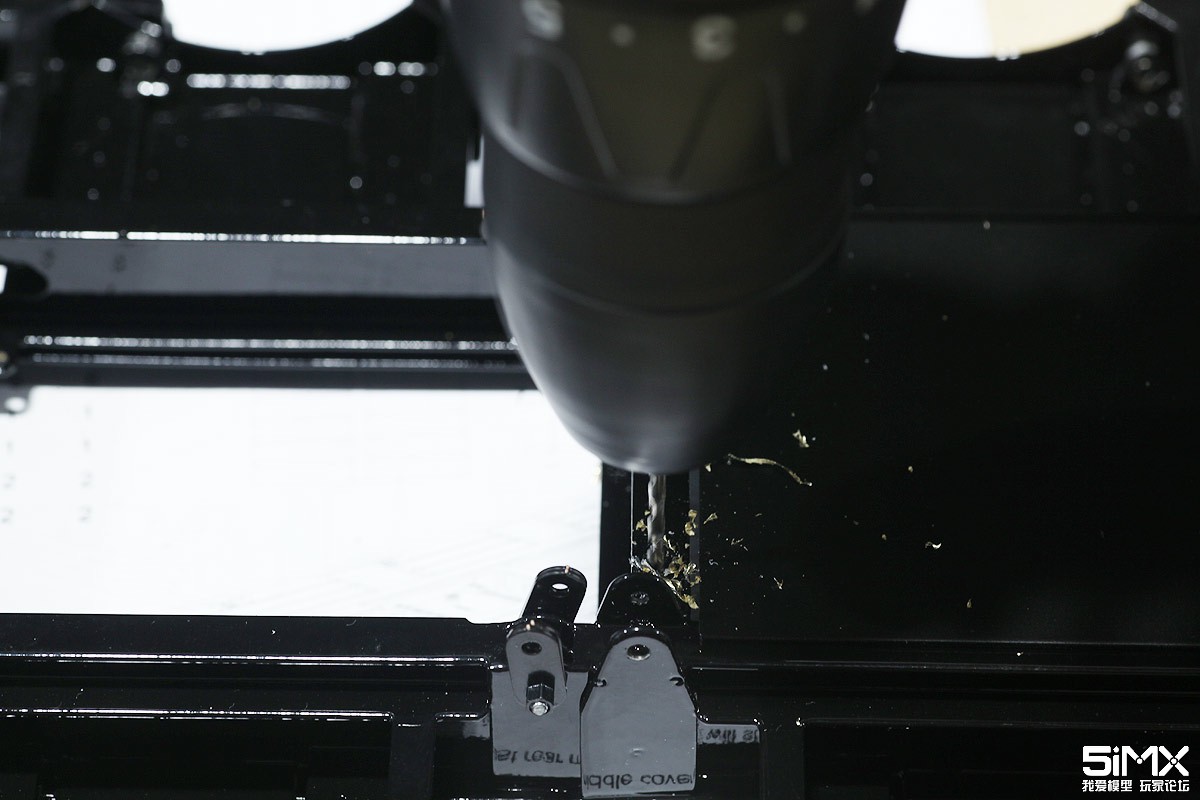
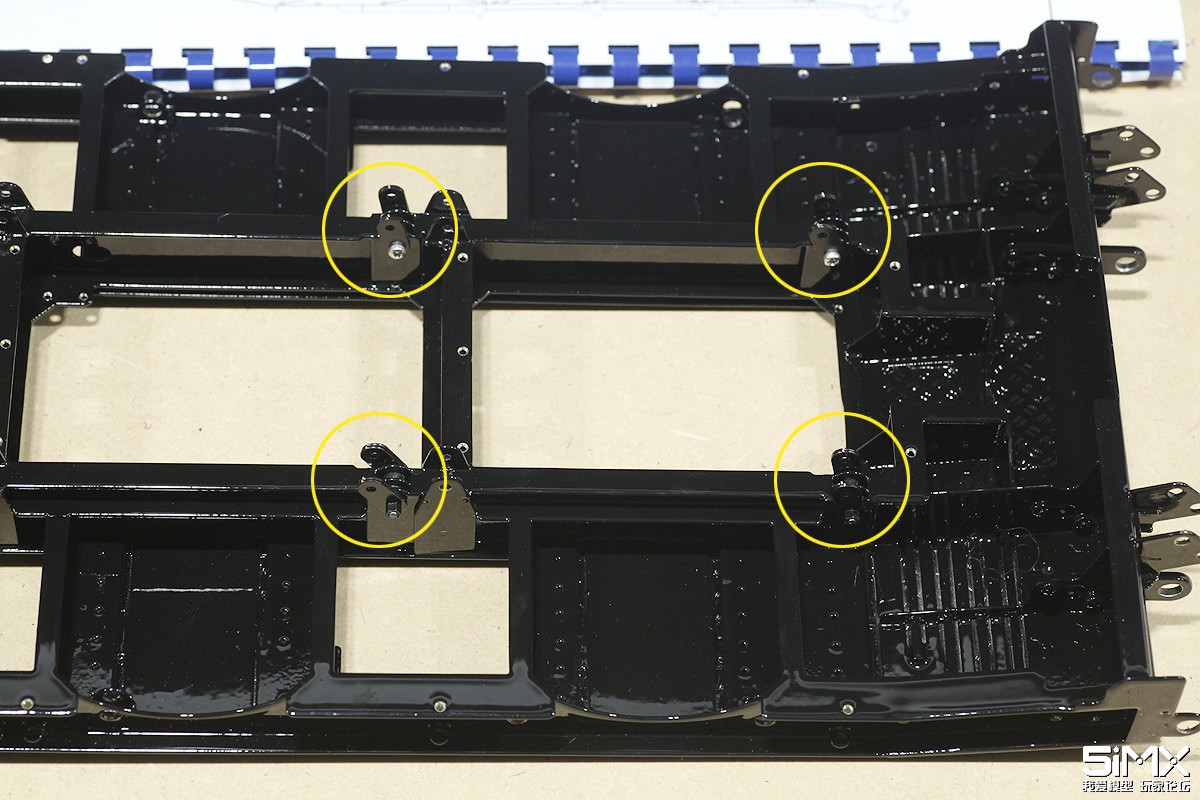
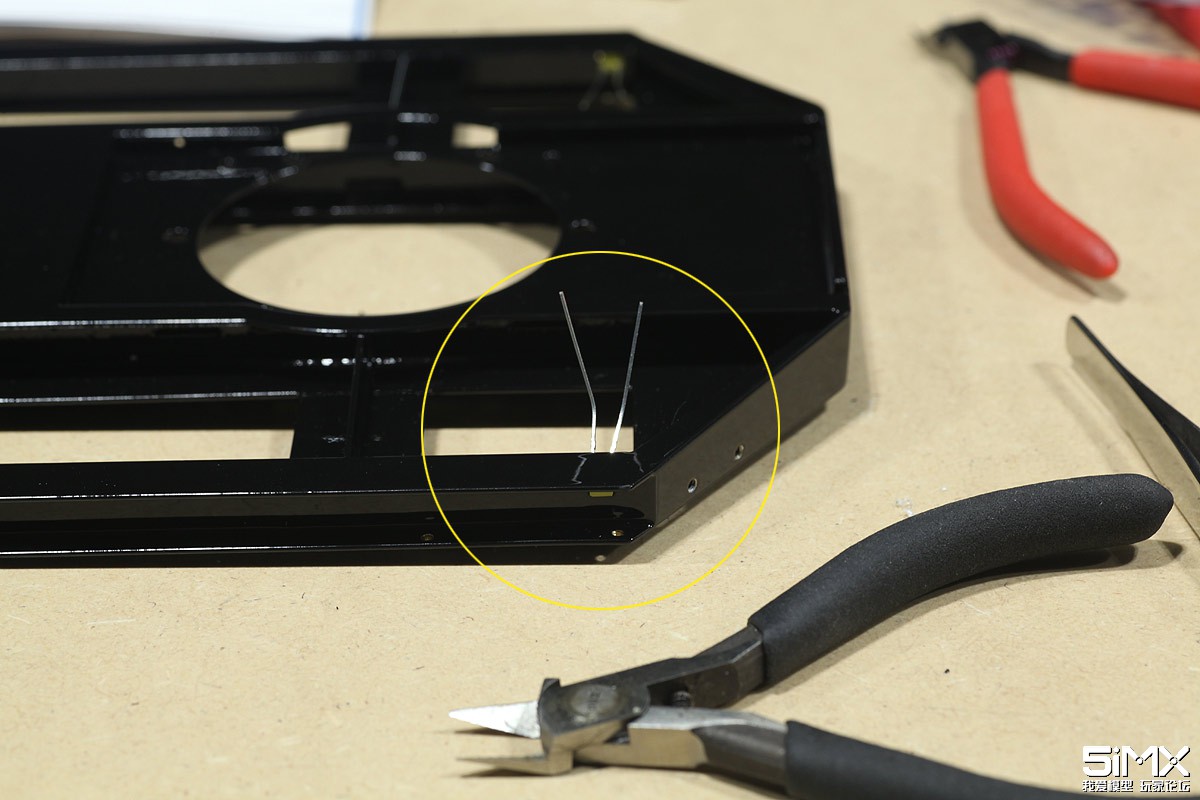
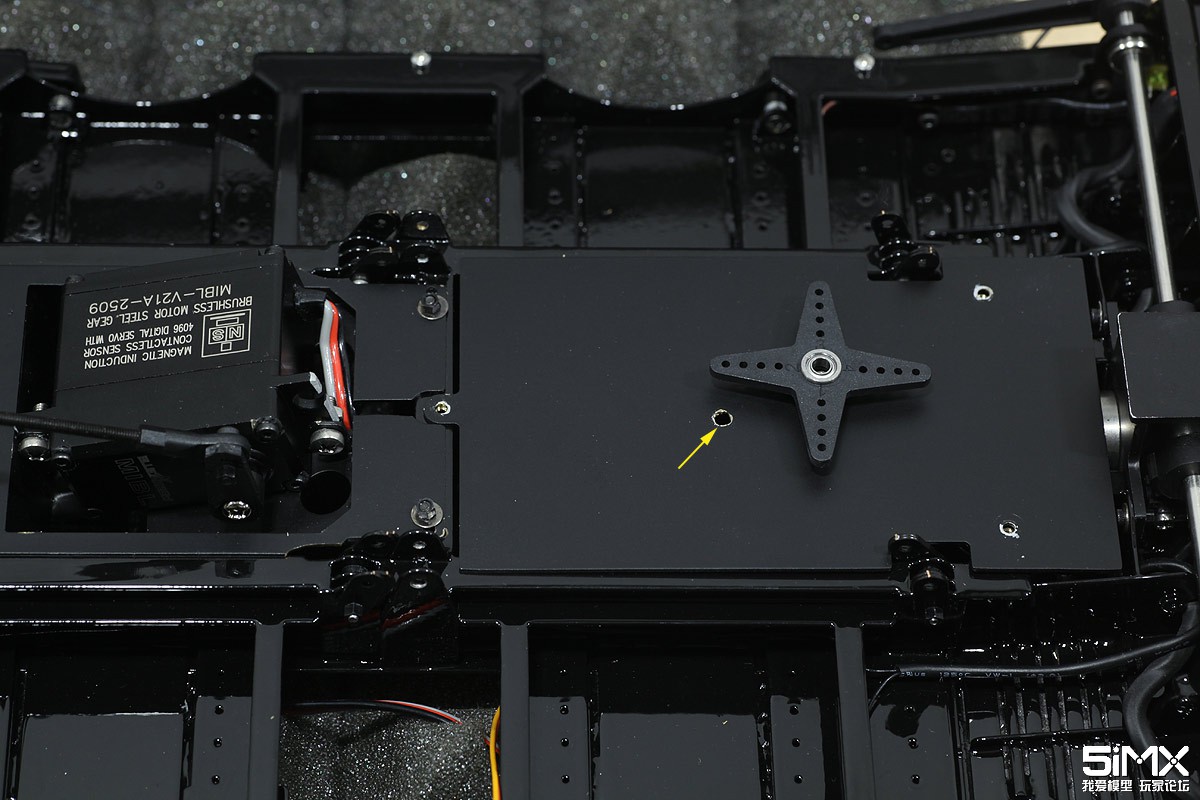
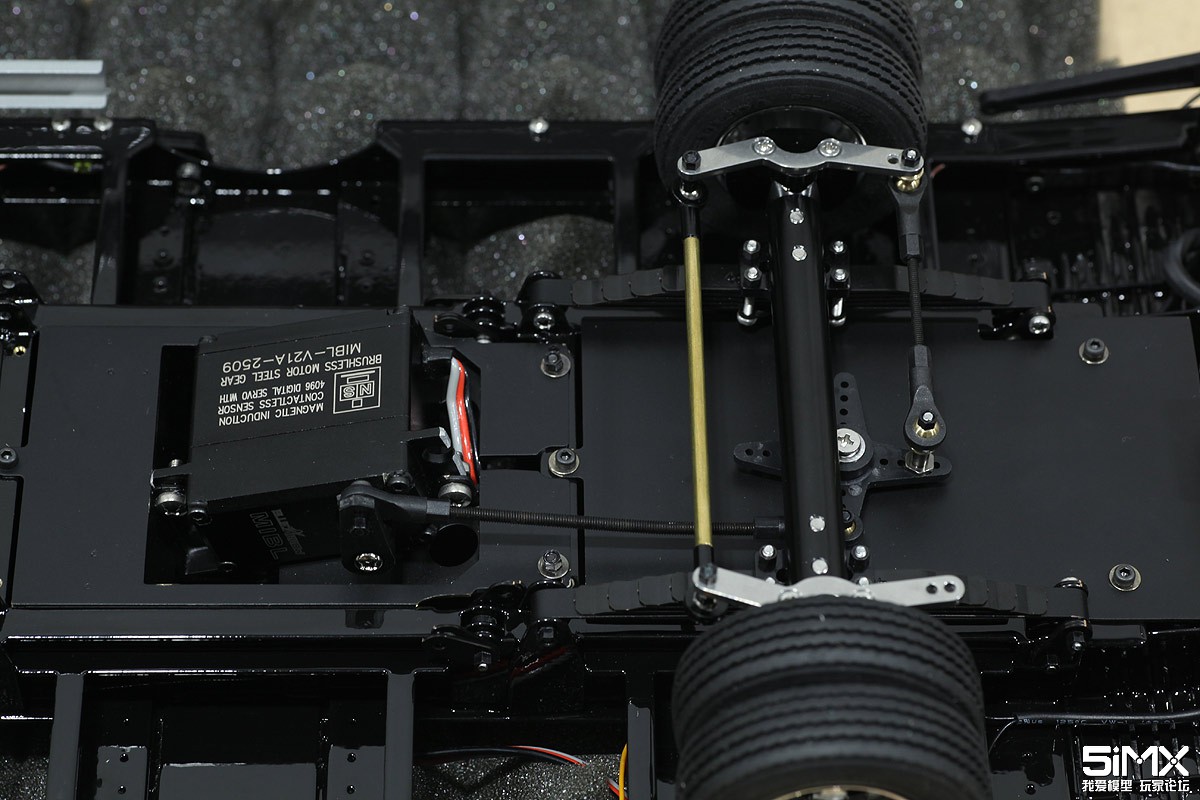
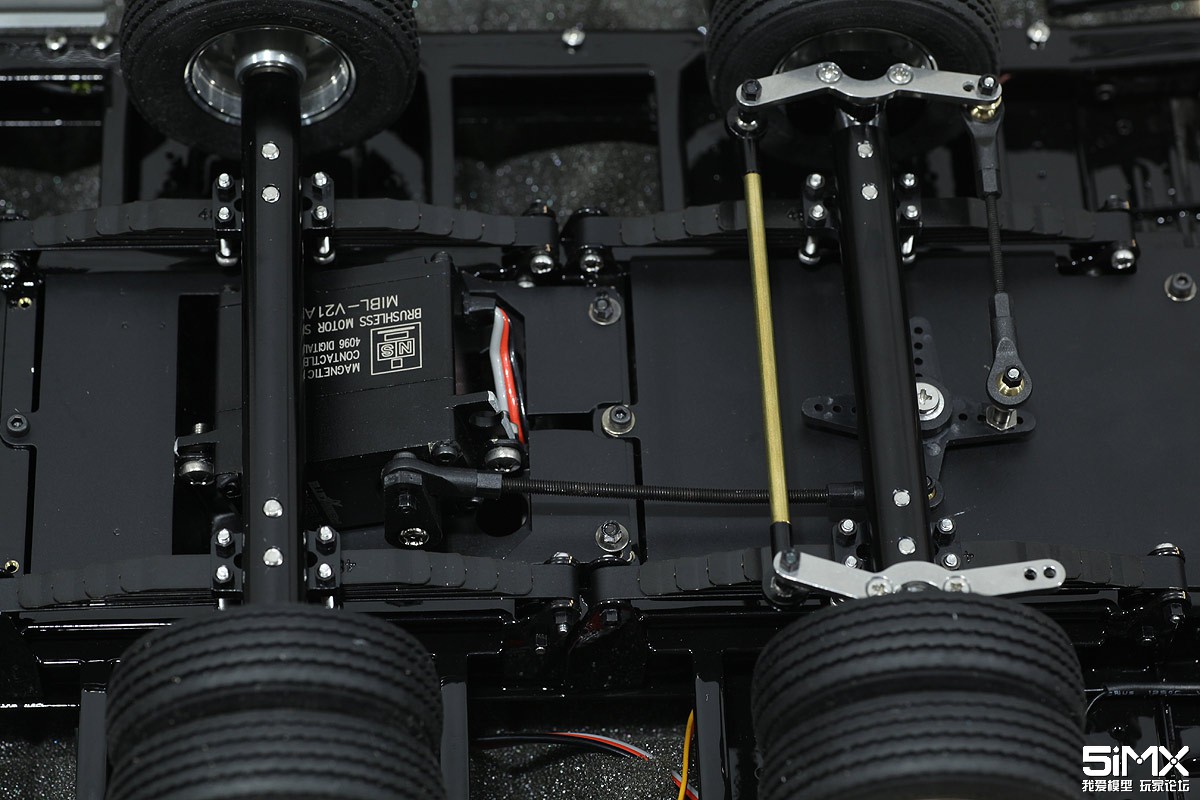
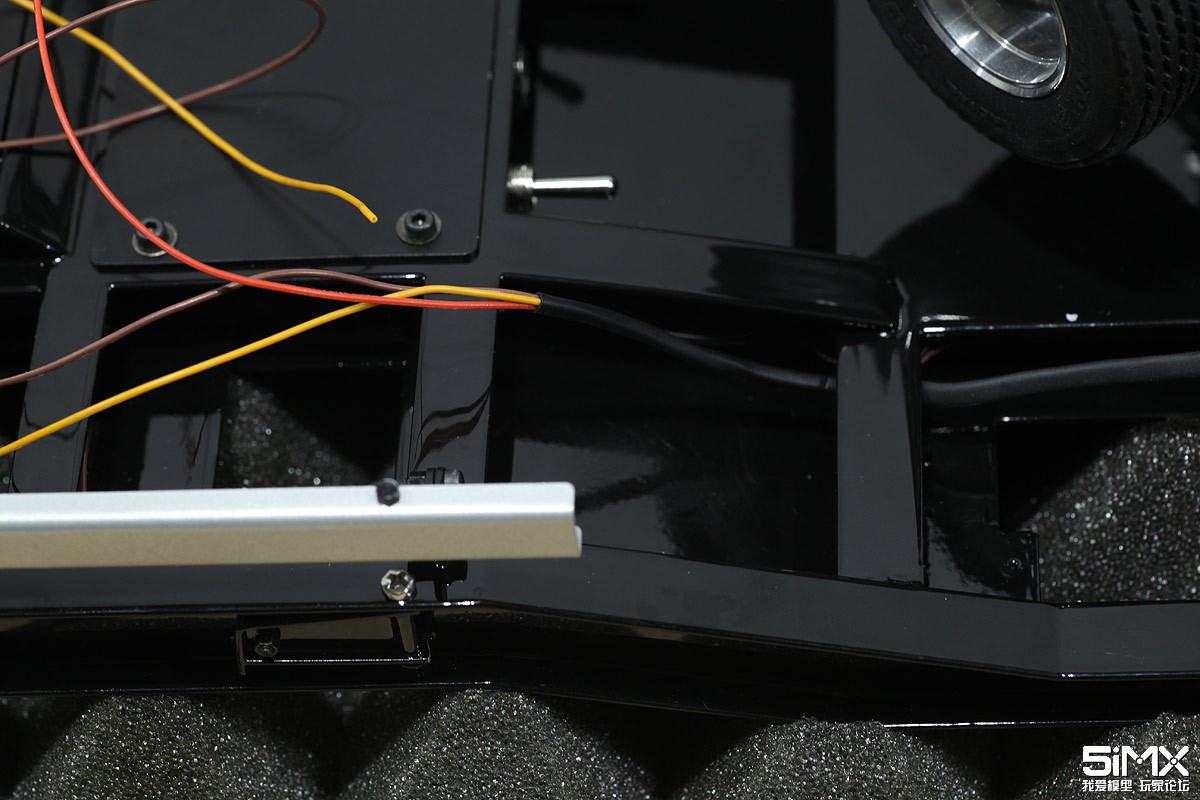
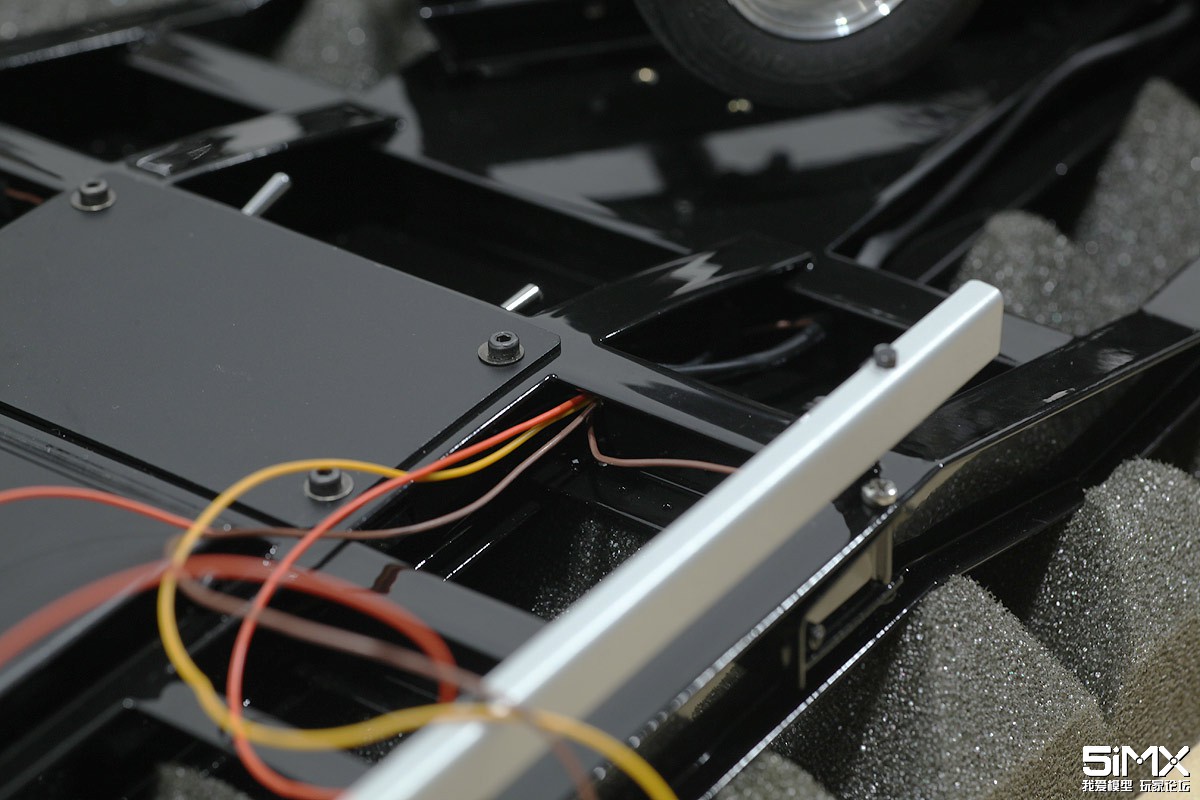
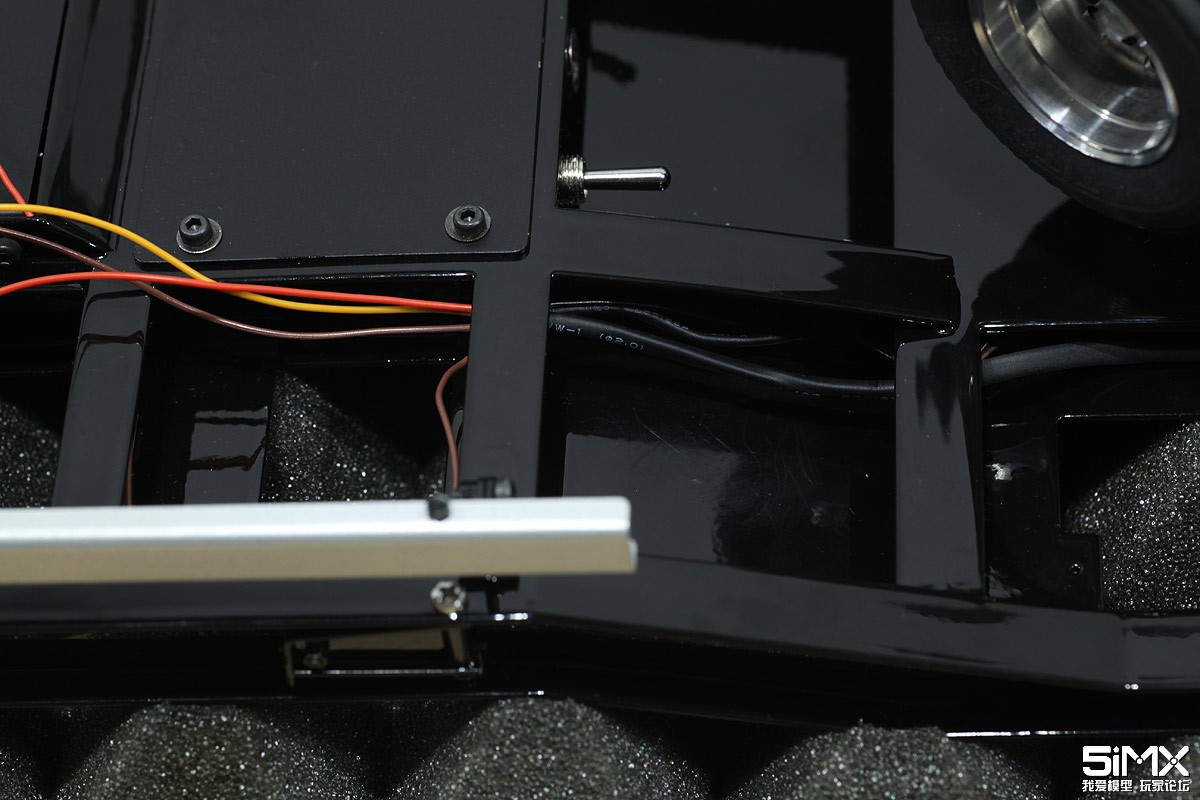
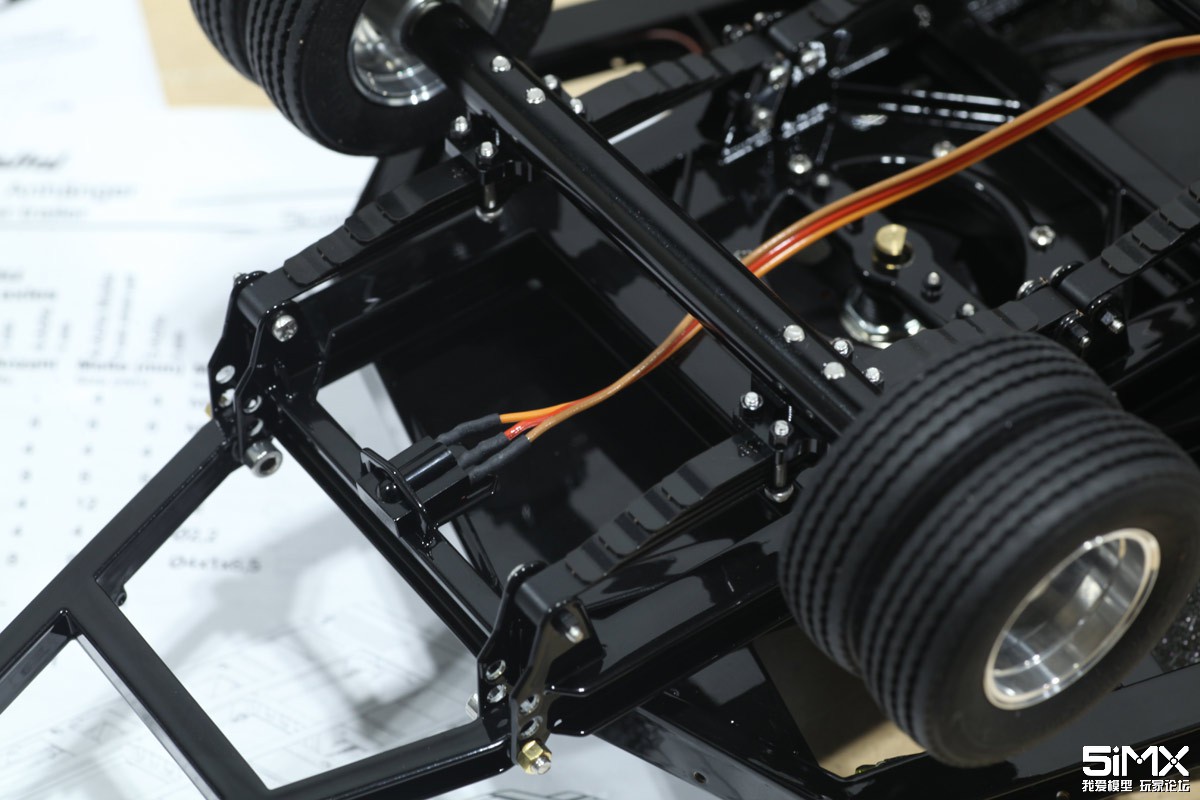
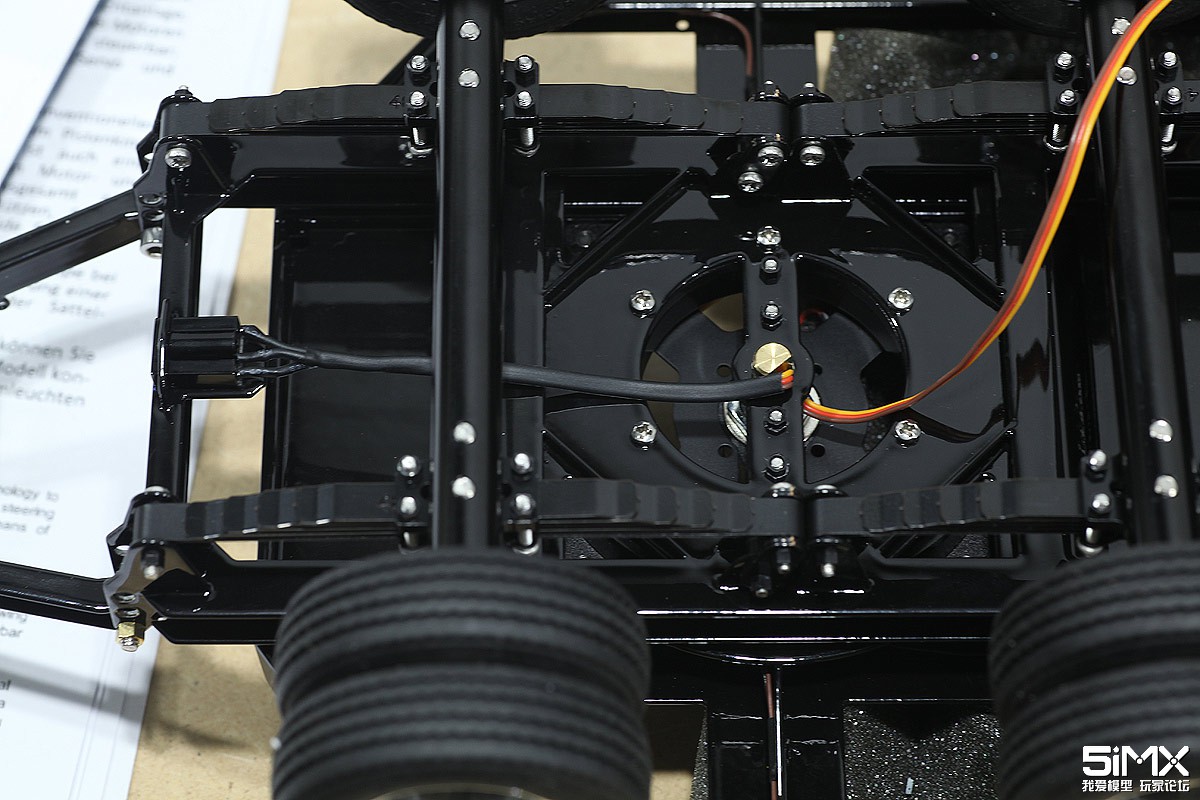
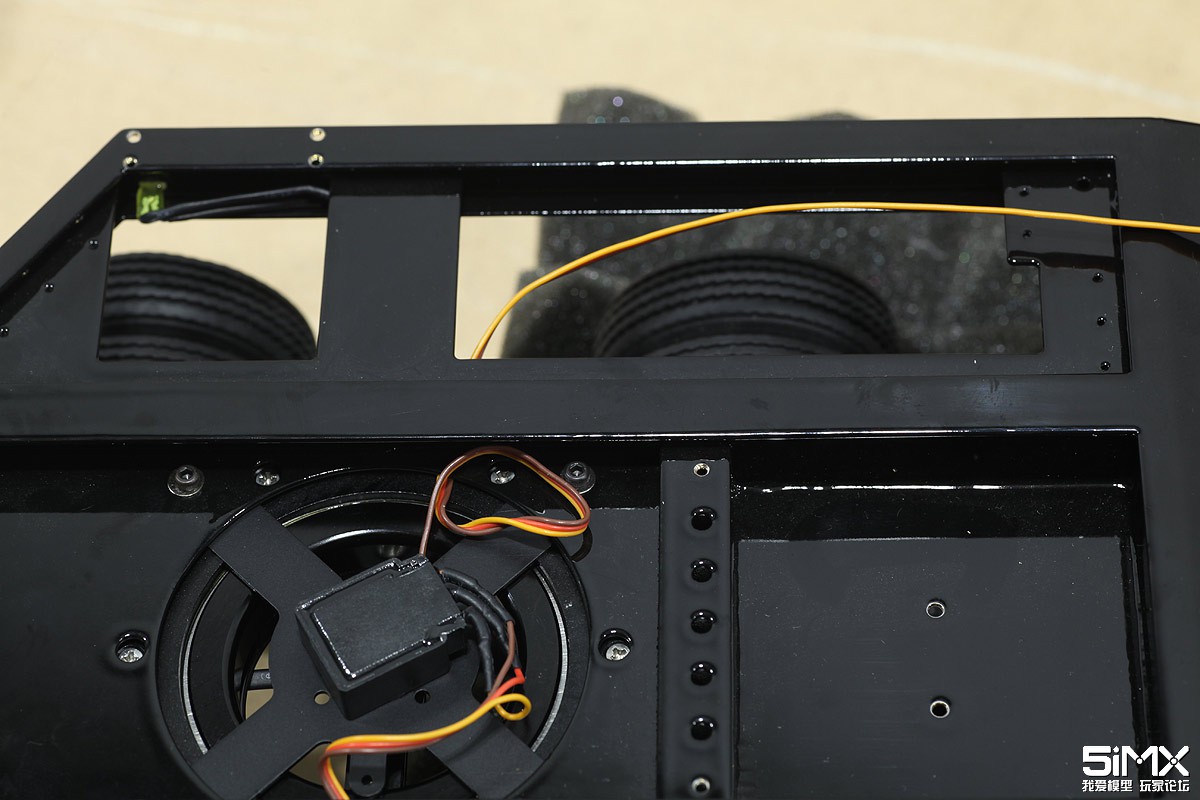
这里需要打孔,用来安装尾随动转向驱动舵机。
因为原本这个版本的板车不带随动转向,但SA发错了规格,这里需要少许改动安装孔位才能固定舵机固定架。
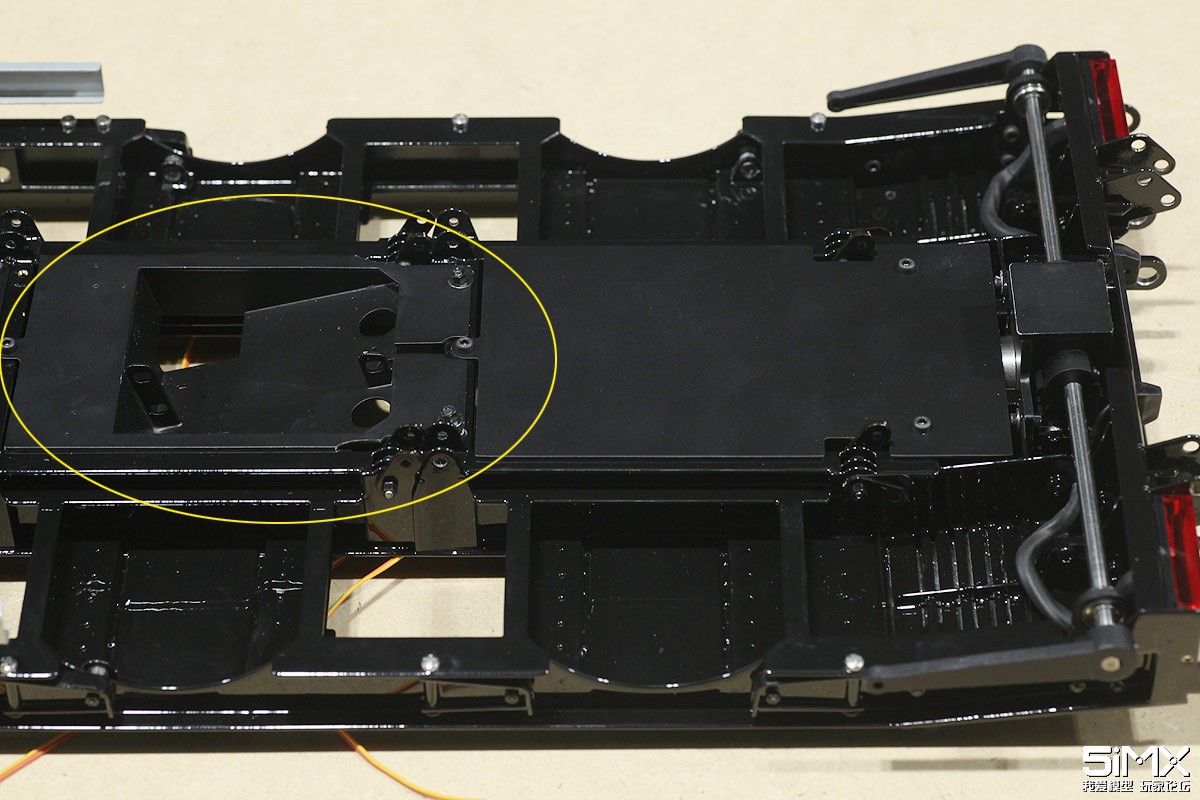
照片上黄圈的部分就是舵机固定架
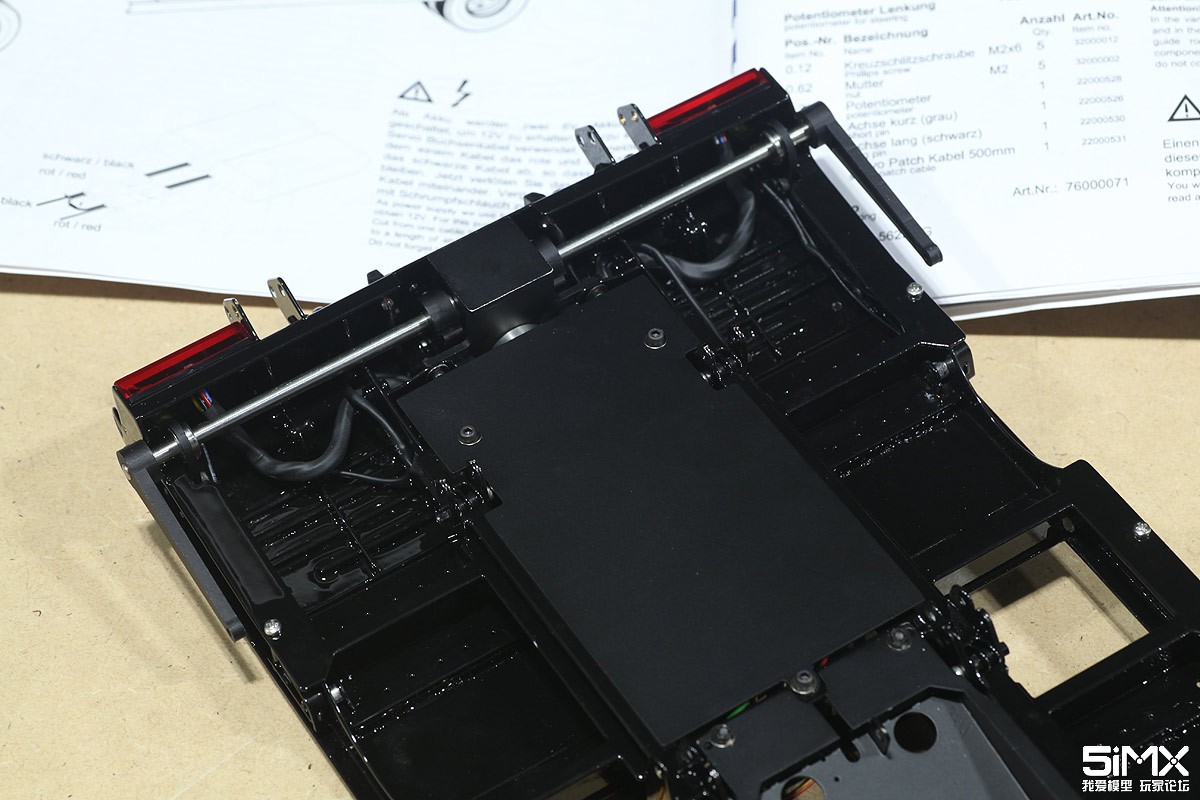
右边板是底板已经安装好了,这样从底部就看不到那些电线了。
第四章 拖车板轮廓灯的安装

板车的轮廓灯是这种方块的LED,ScaleART提供了一些多余的LED备用。因为要把这些LED安装到车架的孔位内,需要预先打磨LED的尺寸,难免不会遇到失手的可能。
打磨好尺寸的LED才能安装,紧配合安装,固定好位置后用AB胶加固。
每边4颗,一共要装8颗。每4颗LED是串联方式,再4串2并连接在一起,这些LED可以直接接12V主电源驱动,不过我加了一个50欧姆的电阻做保护。

侧面LED的布线比较困难,不过最终还是搞定了。
装上底板后好看了很多
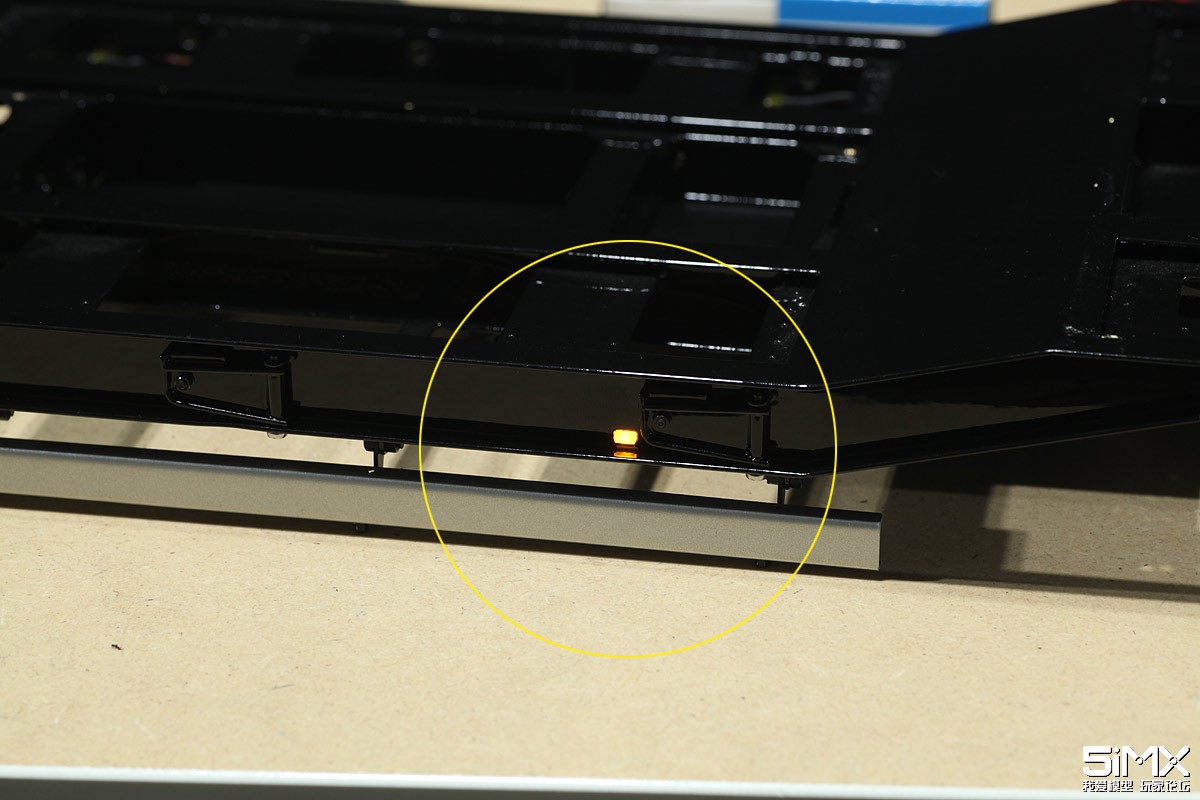
通电试灯,全亮!
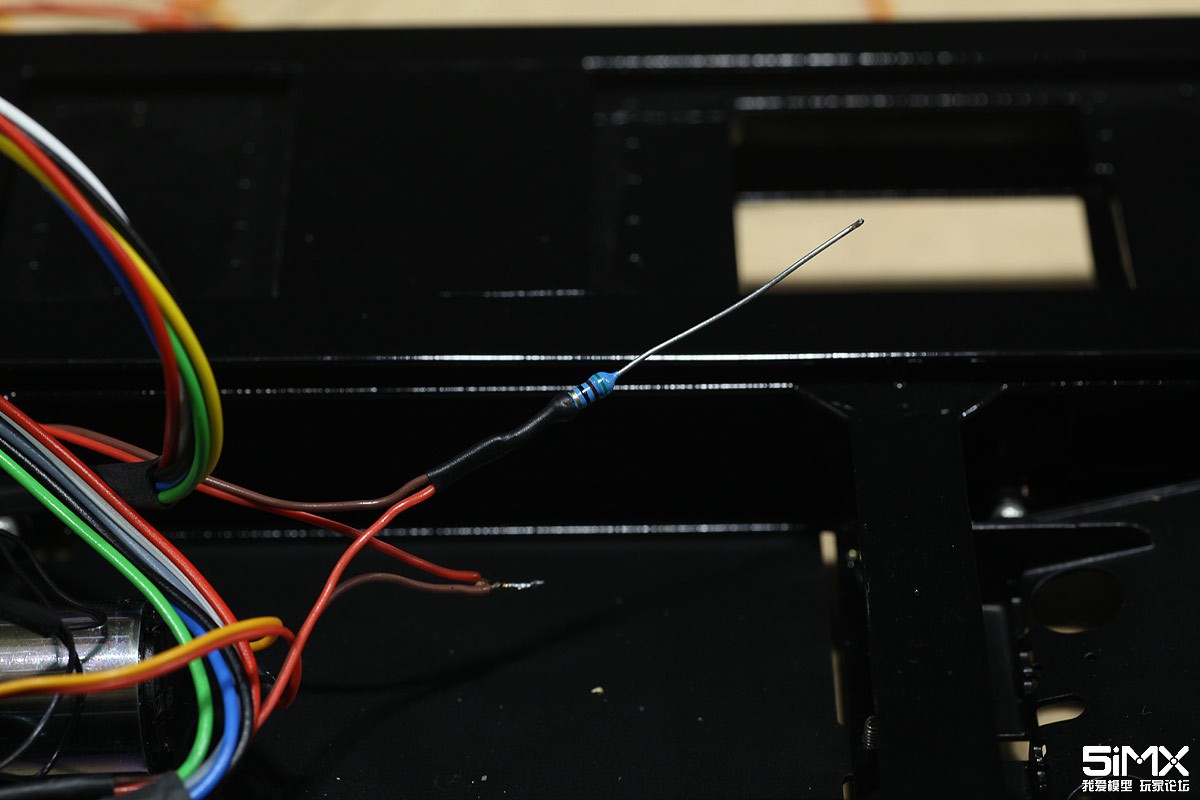
加电阻
这样用12V驱动也没有什么好担心的
第五章 拖车板改装随动车轮
这款平板的尾轴原本不带随动转向功能。不过既然ScaleART给了我一些有用的零件,那么我就再接着DIY一些配套的零件,随动转向功能就能够很快实现了。

首先准备一个舵机摇臂,6mm直径的钻头,以及两颗6mm的法兰轴承。

将摇臂中间的孔扩大到6mm直径


把法兰轴承安装上去

测算定位孔
在底盘上钻一个定位孔
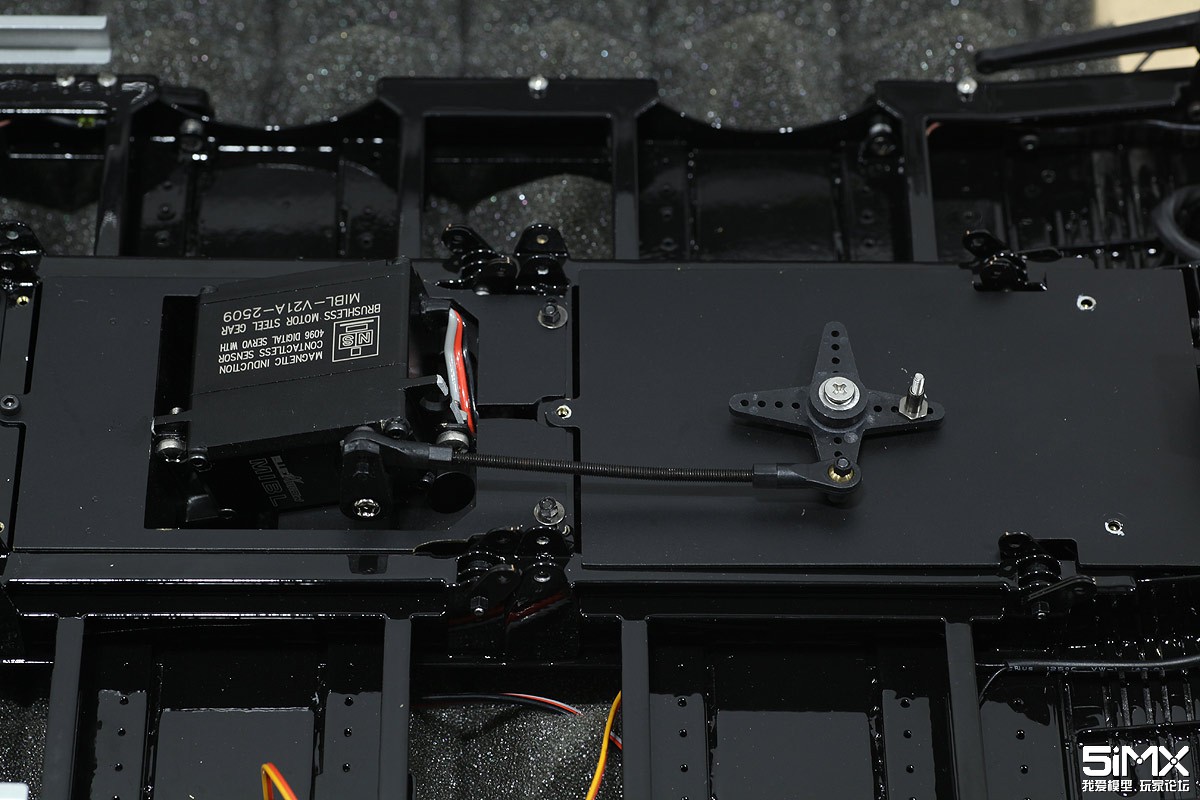
固定安装摇臂
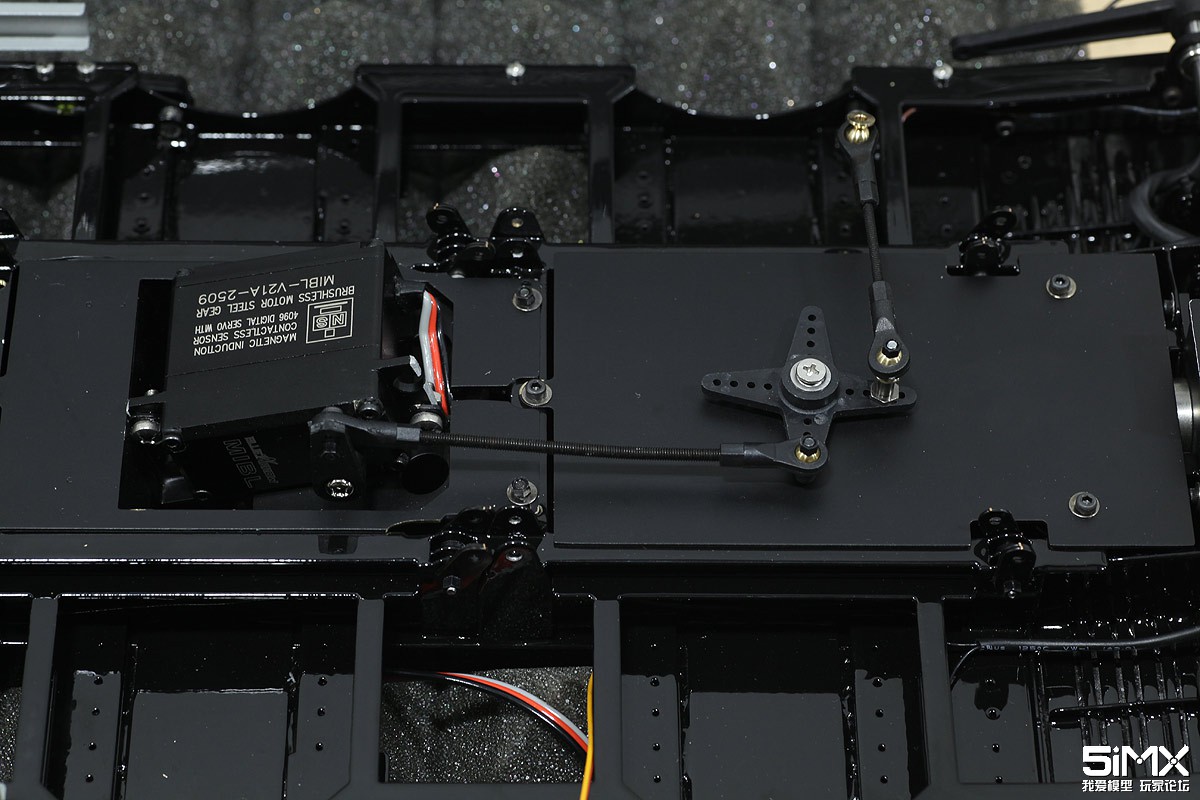
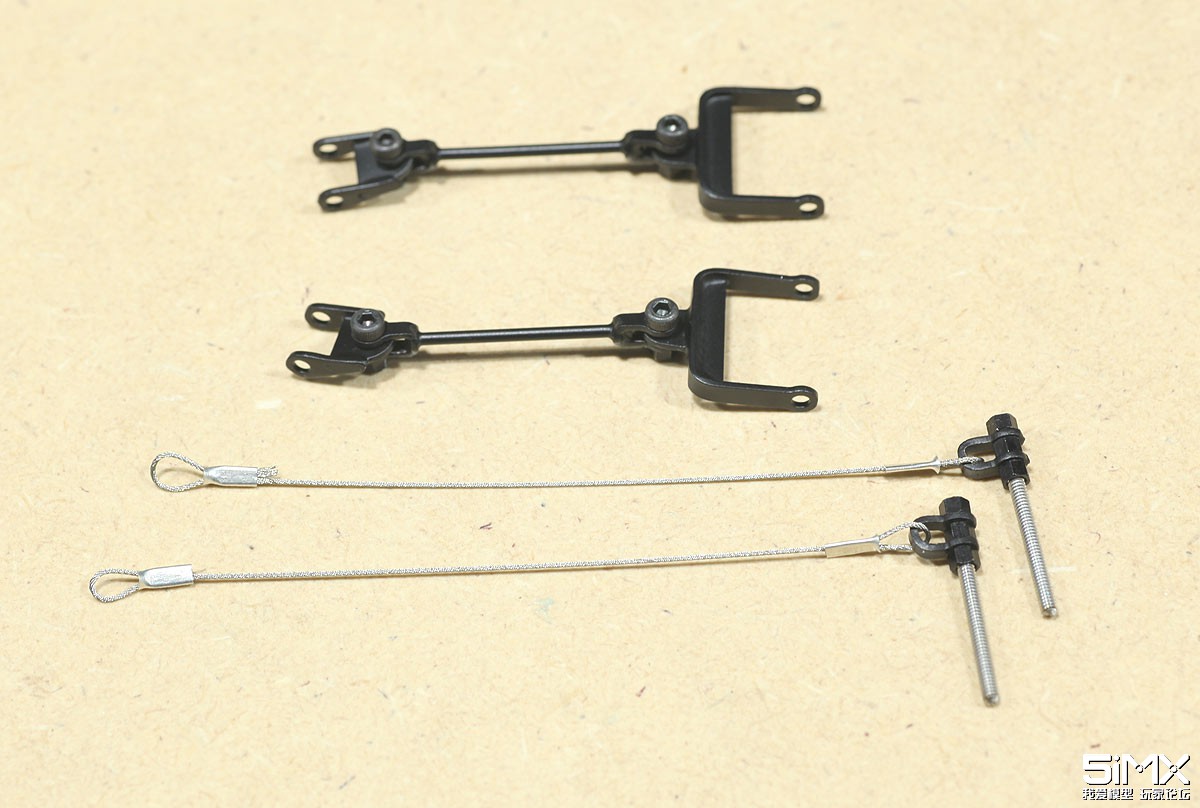
安装好两根连杆
转向桥安装完成
两个后桥全部安装完成。
到这个步骤,随动转向的硬件部分就安装完成了。然而仅仅到这一步它是不会正常工作的。接下来还需要安装位置传感器和驱动器。
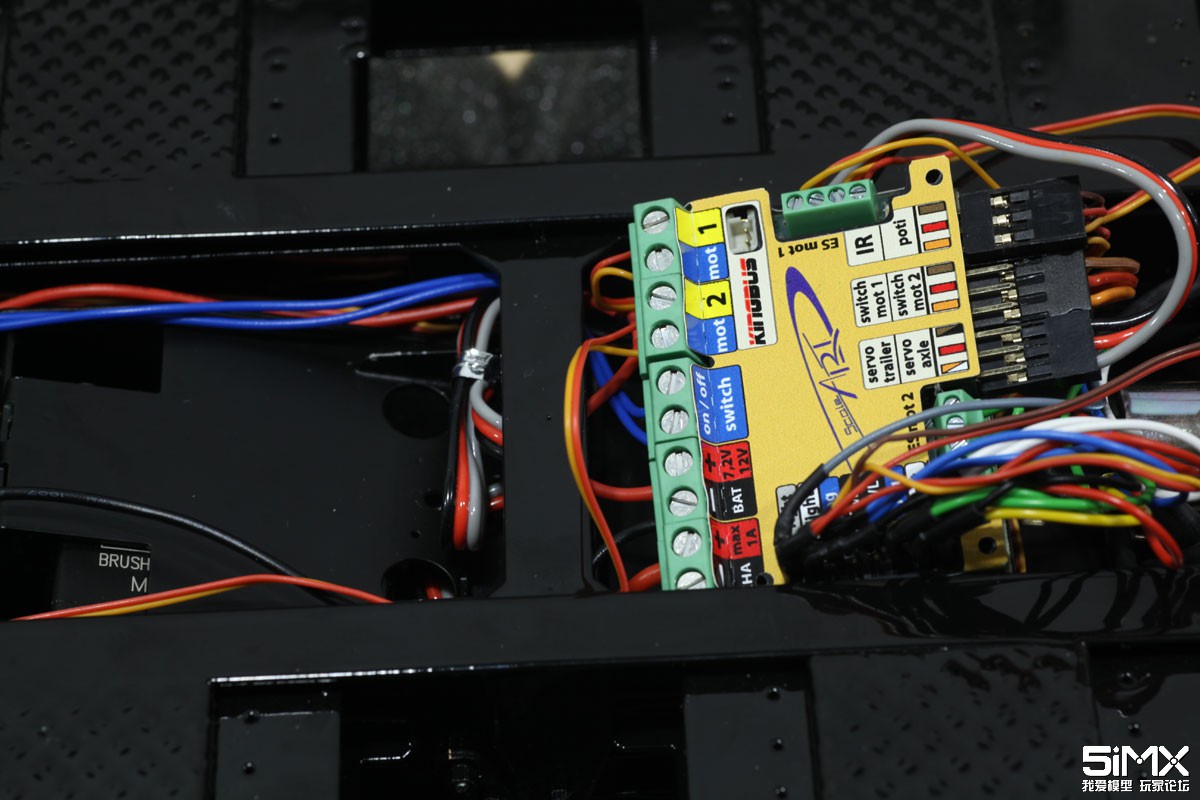
第六章 整车中和控制电路设置
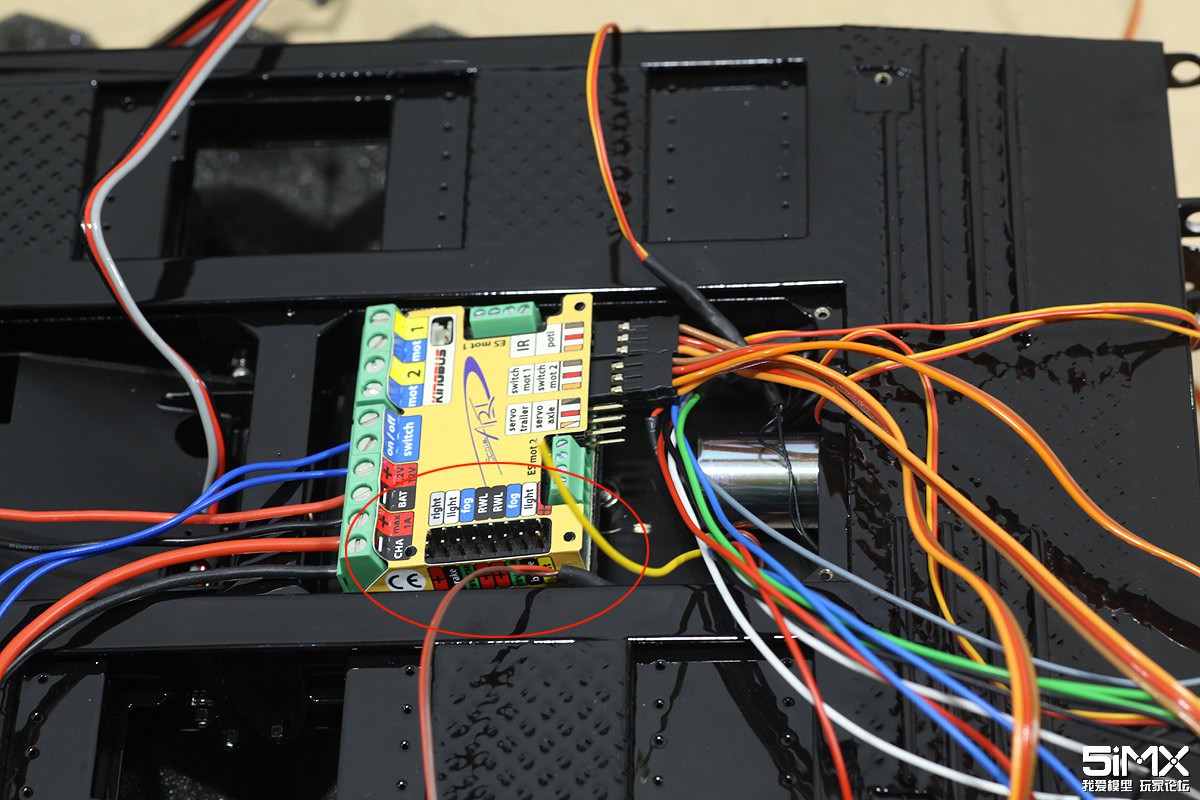
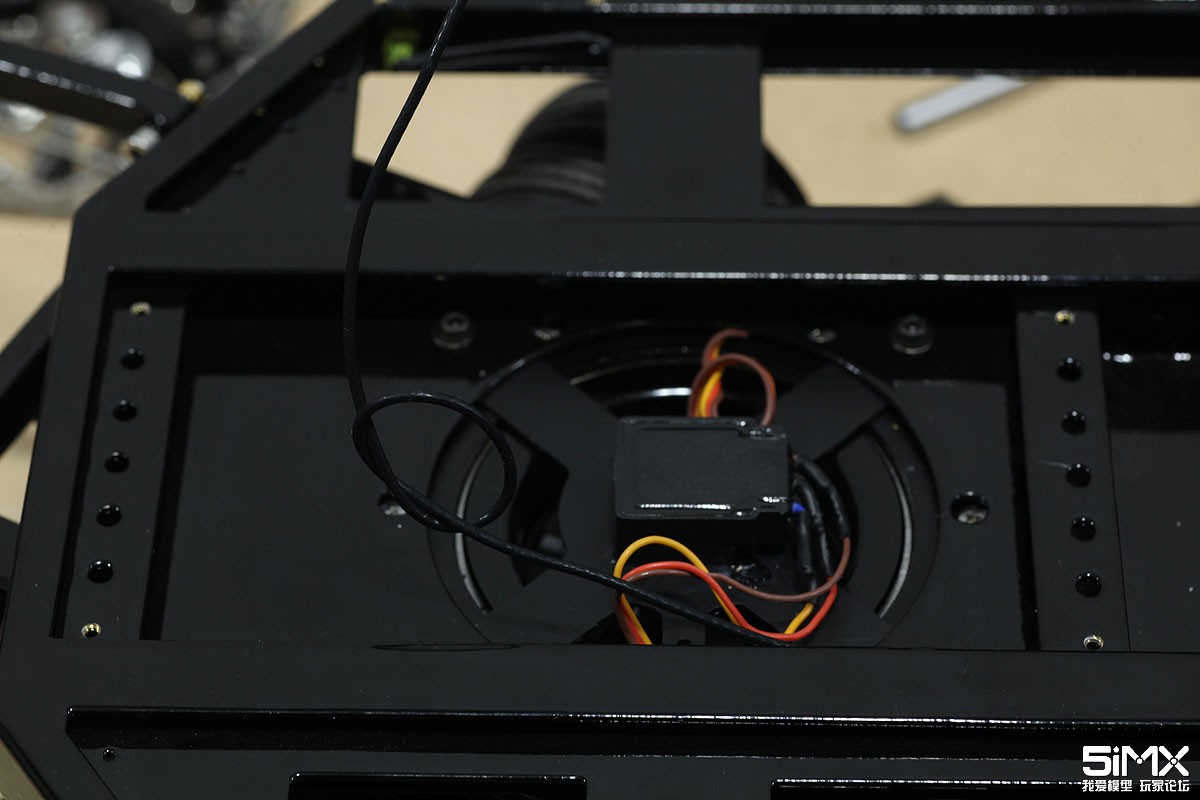
大家现在看到的这个电路就是整台车的综合控制器。它通过红外线接收器接收从牵引车传送过来的控制信号,很简单的功能就是灯光联动。比如牵引车的左右转弯灯、倒车灯、刹车灯,等等,通过这个控制器,就可以让后面的挂车联动起来。
复杂一点的功能还包括:
1. 两路电机输出(带有限位触发开关),通常一个电机是驱动执行,另一个是油泵电机
2. 两路舵机输出
3. 两路电机输出除了能通过牵引车独立遥控,还可以在不借助遥控器或牵引车的情况下手动控制
首先连接尾灯线到控制器上
使用上图所示的插针,套上热缩管

尾灯所有线缆插接到位
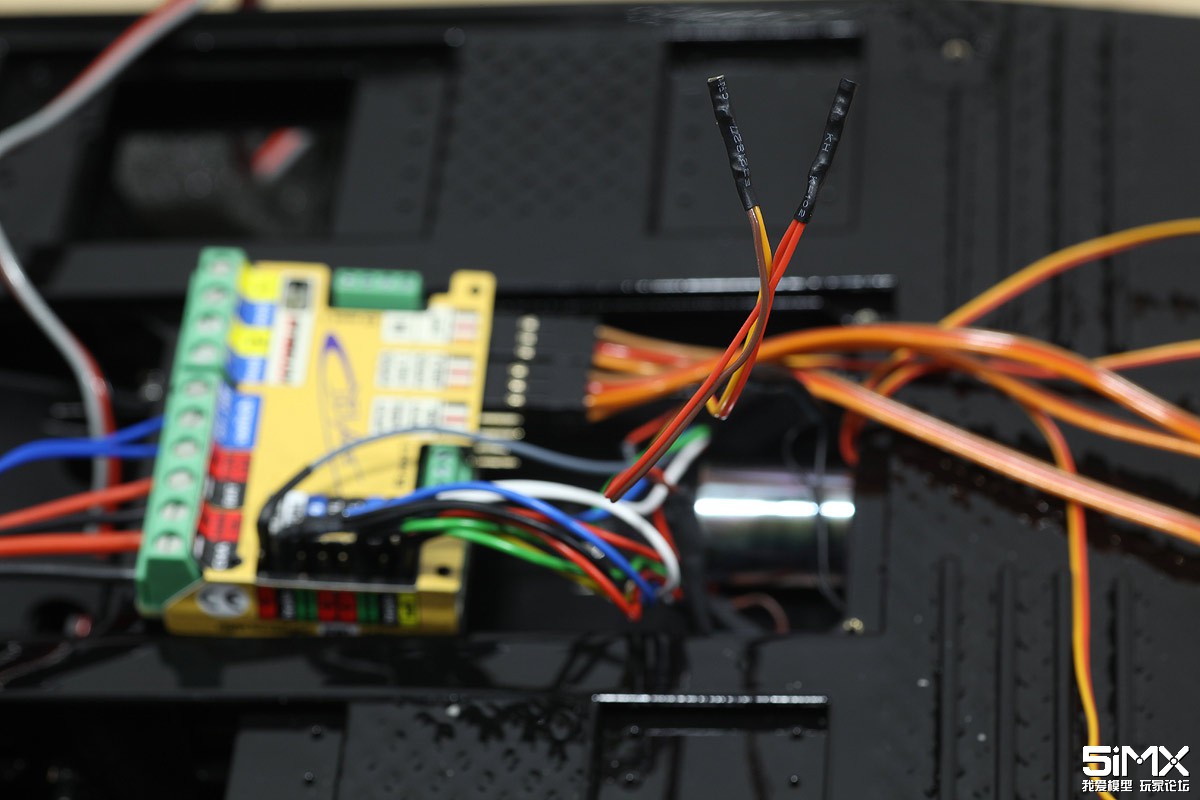
示宽灯是两路并在一起的,所以如上图这样用4变2进行处理。
尾灯除了方向灯要分左右,其他灯都是同时亮的,所以我把需要同时亮的灯也并在了一起。
通电试灯

调节尾板升降臂的上下止点位置。
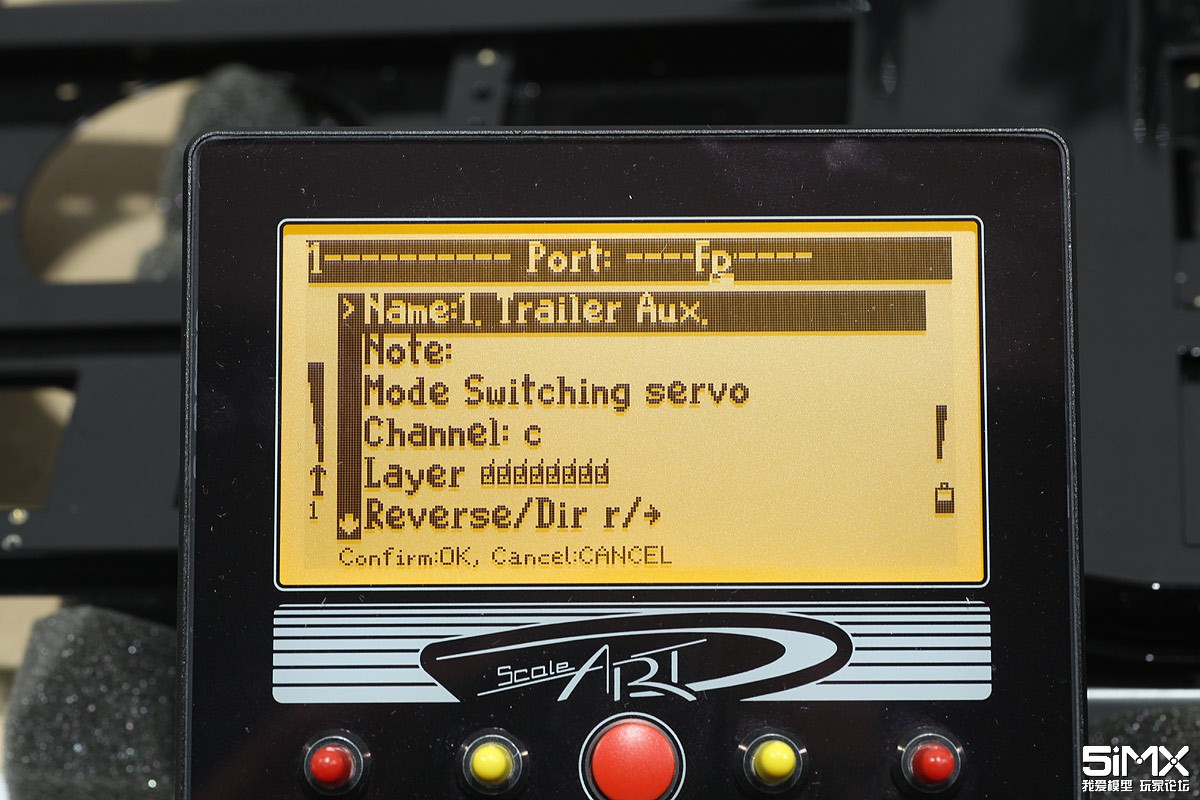
为尾板升降控制分配遥控器开关
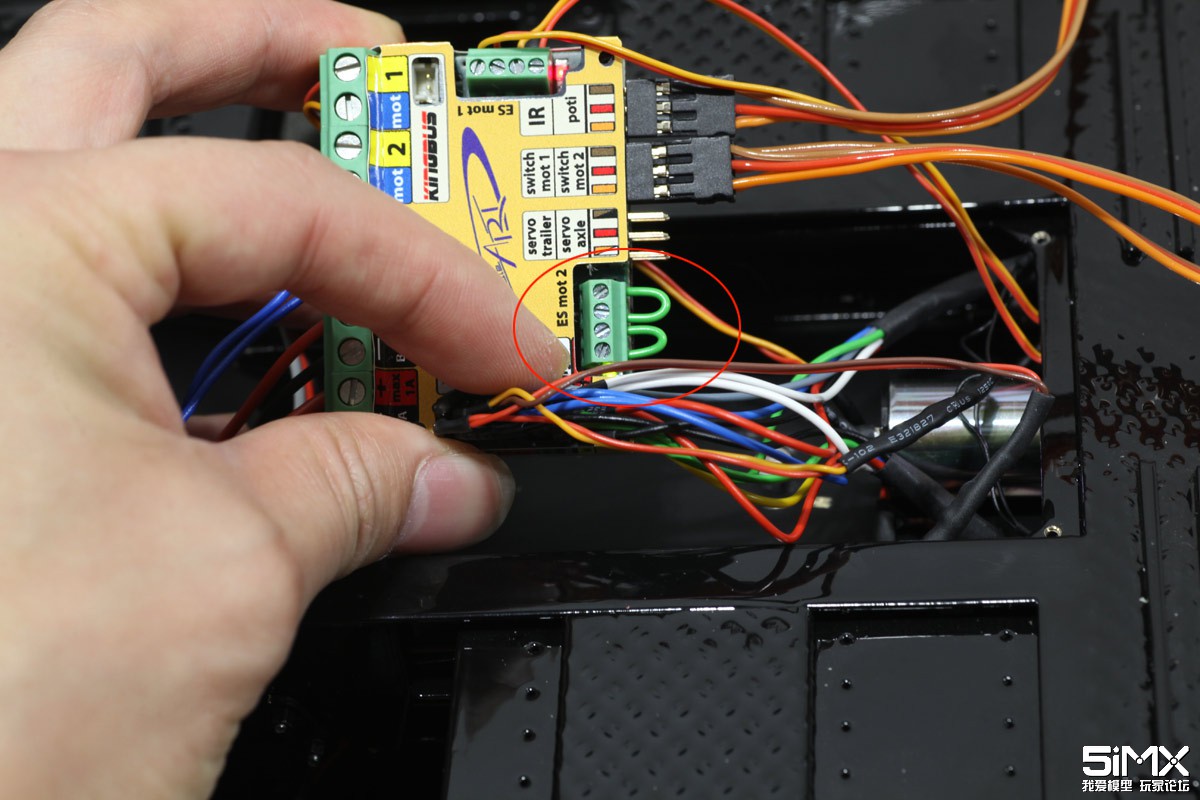
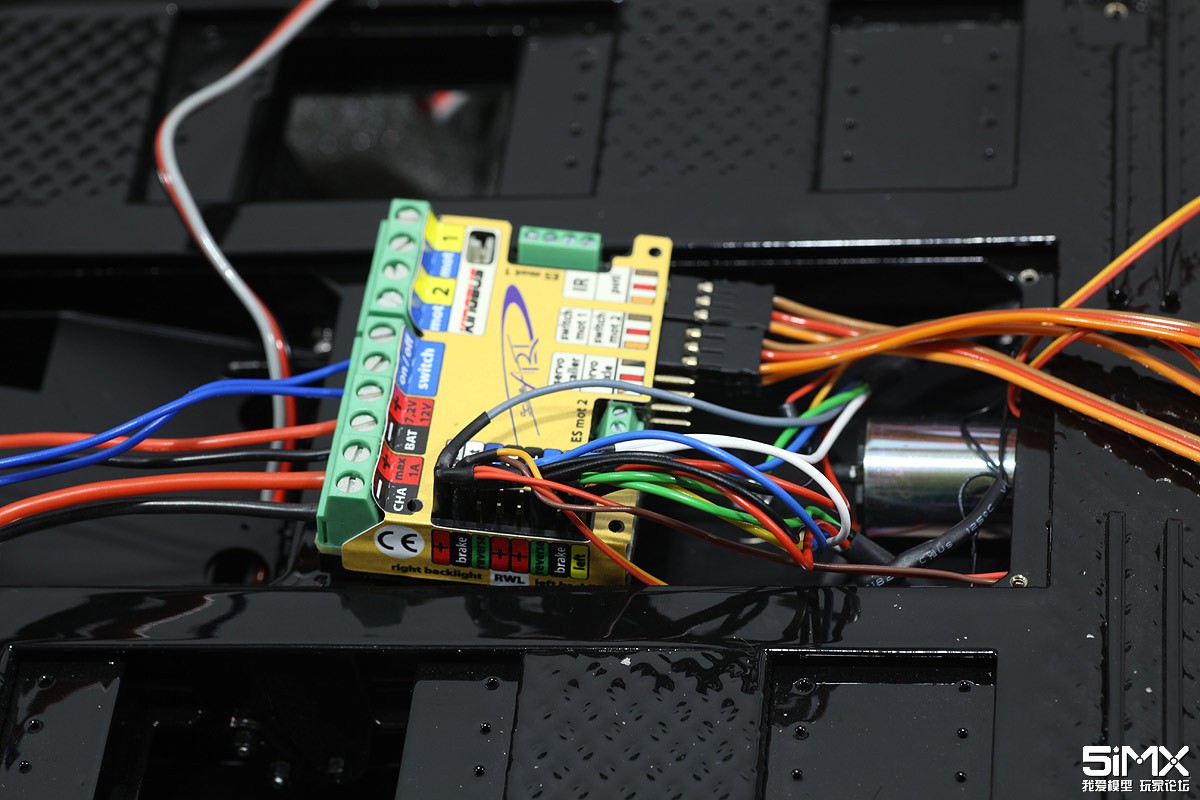
上图约圈中的接头用绿线导通起来了,这是让Motor 2处于常转无止点模式。
Motor 2端口用来接绞盘。
把绞盘连接到Motor 2端口
而Motor 1端口连接的是尾板升降电机
从下到上分别是:电源开关、充电插座、尾板升降手动控制开关

装上盖板

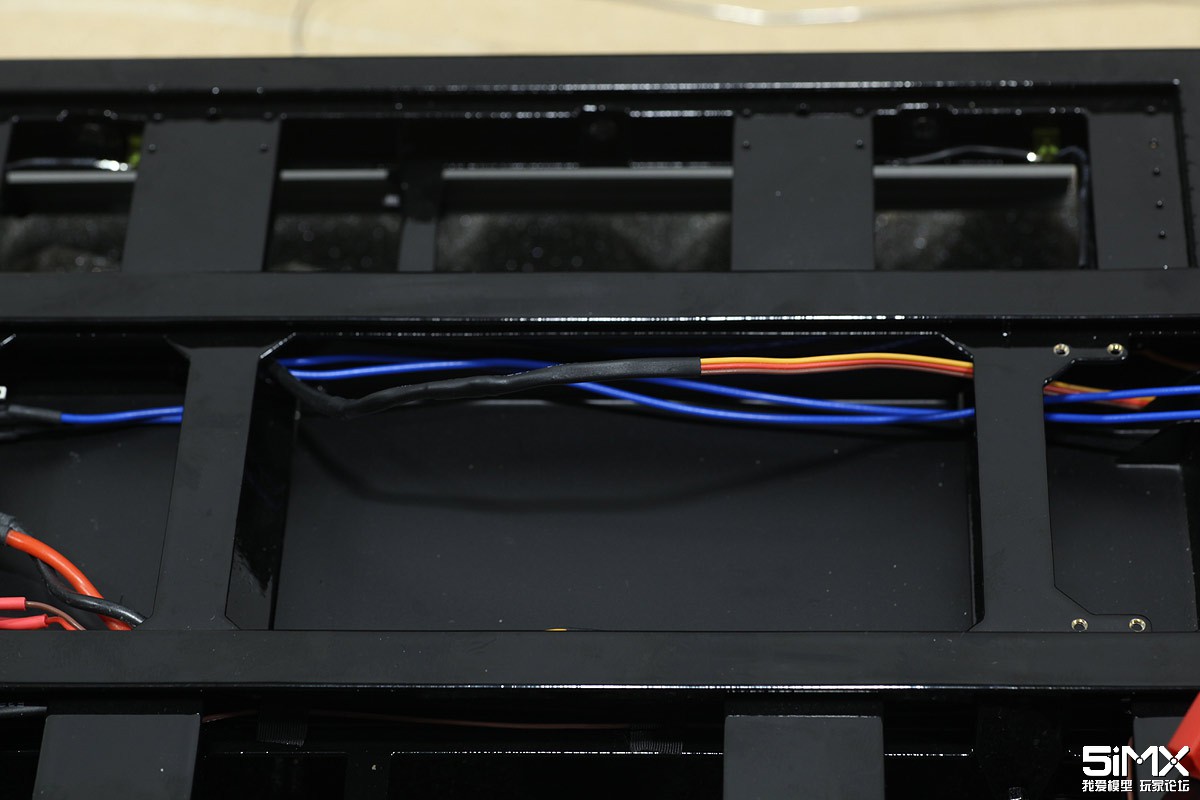
内部走线
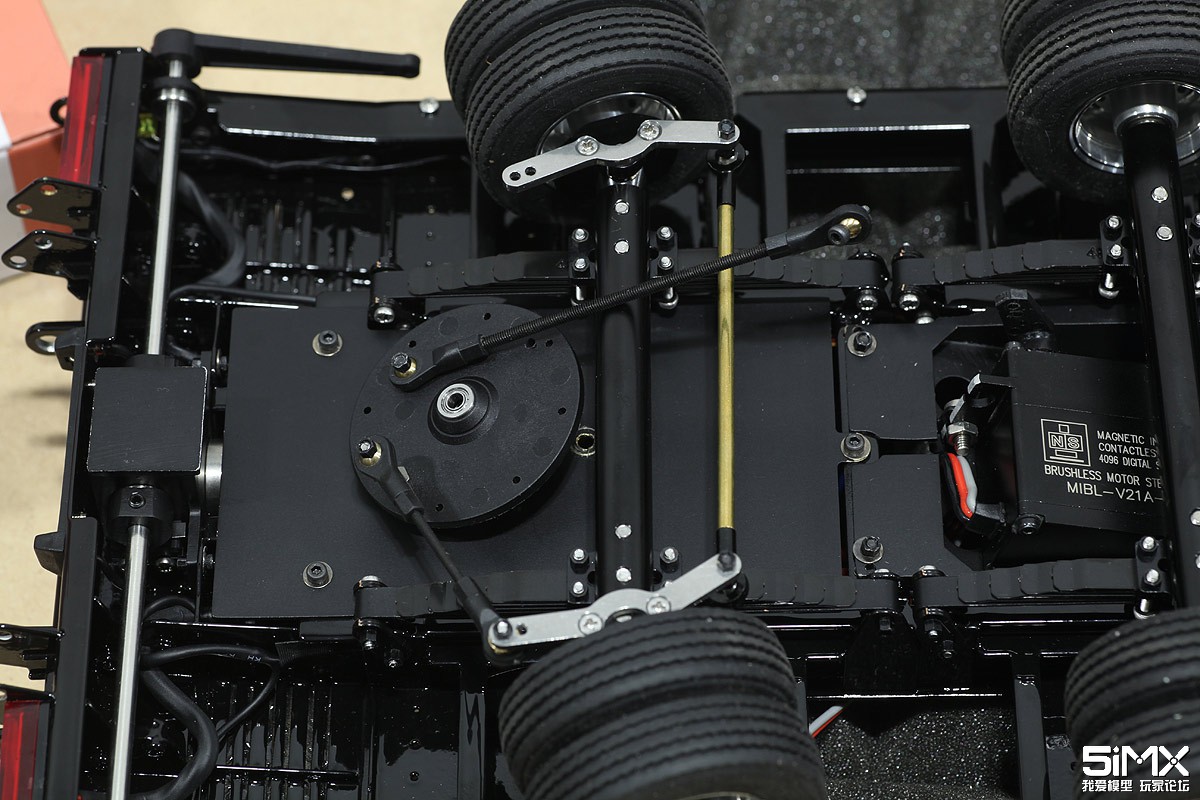
第七章 随动转向电位器
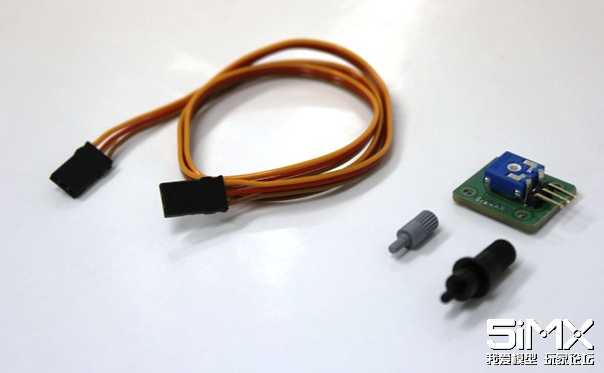
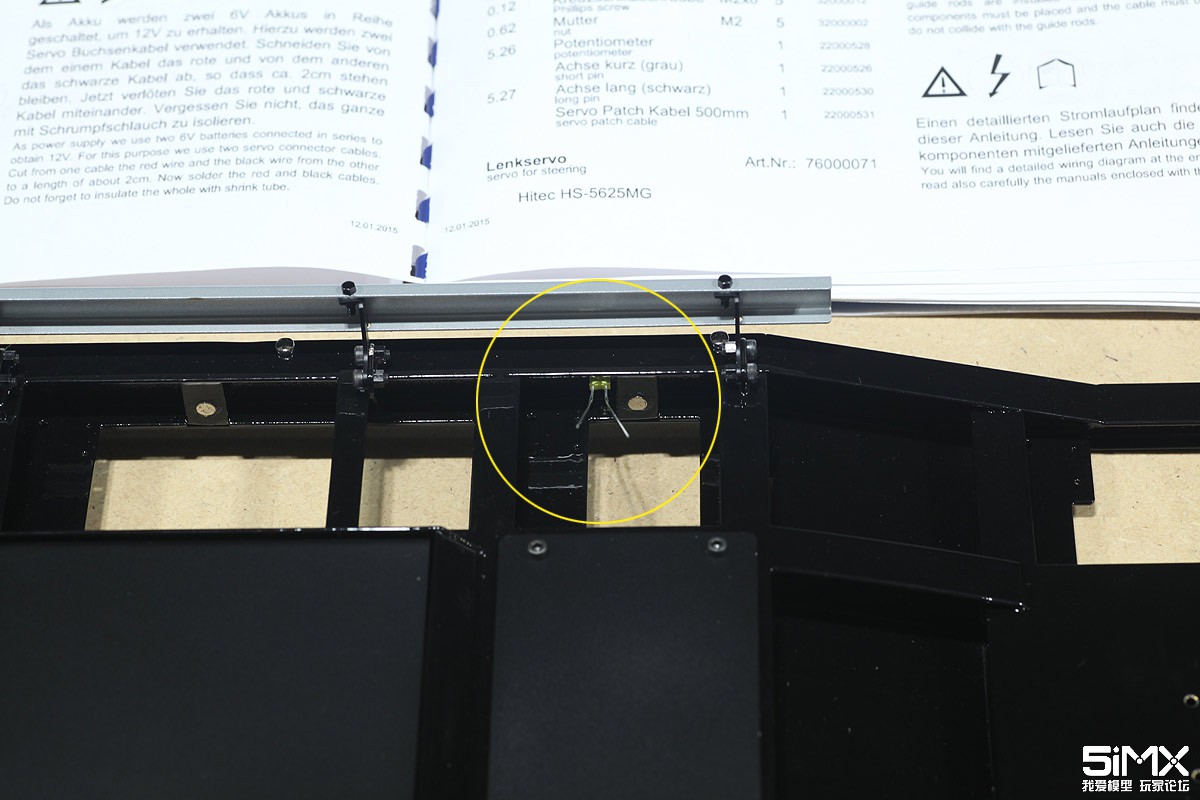
接下来要安装随动转向的位置传感器。这个配件ScaleART没有发过来,它原本的样子如图所示。这张图取自ScaleART官网,它实际上是一个可调节的电位器,阻抗是10K欧姆。我们只要采用阻抗相同、尺寸相当的可调电位器就能够作为它的替换。
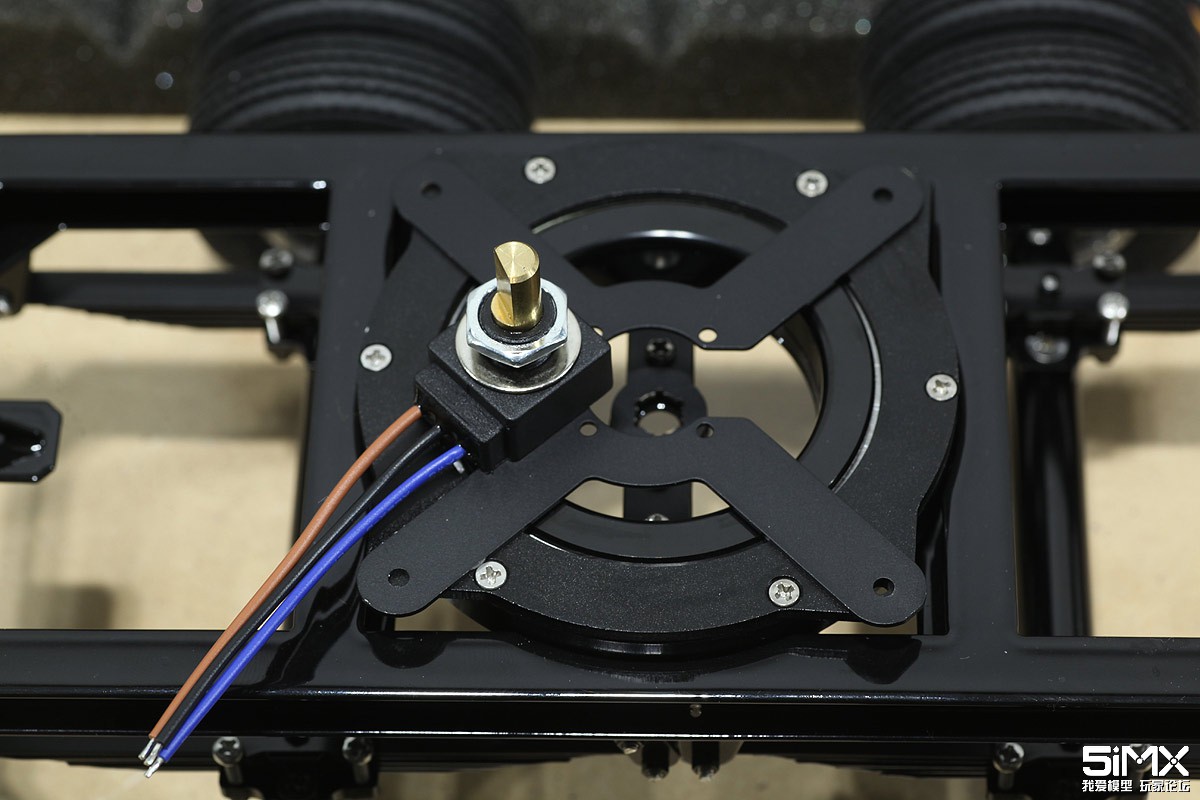
我找啊找,找啊找,终于工夫不负有心人,找到了一款在各方面都基本匹配的可调电位器。请看上图,这个电位器的物理尺寸竟然与ScaleART的安装位置99%匹配吻合,不知道是运气,还是天意,总之,这个小问题就这样被解决了。

测试一下效果
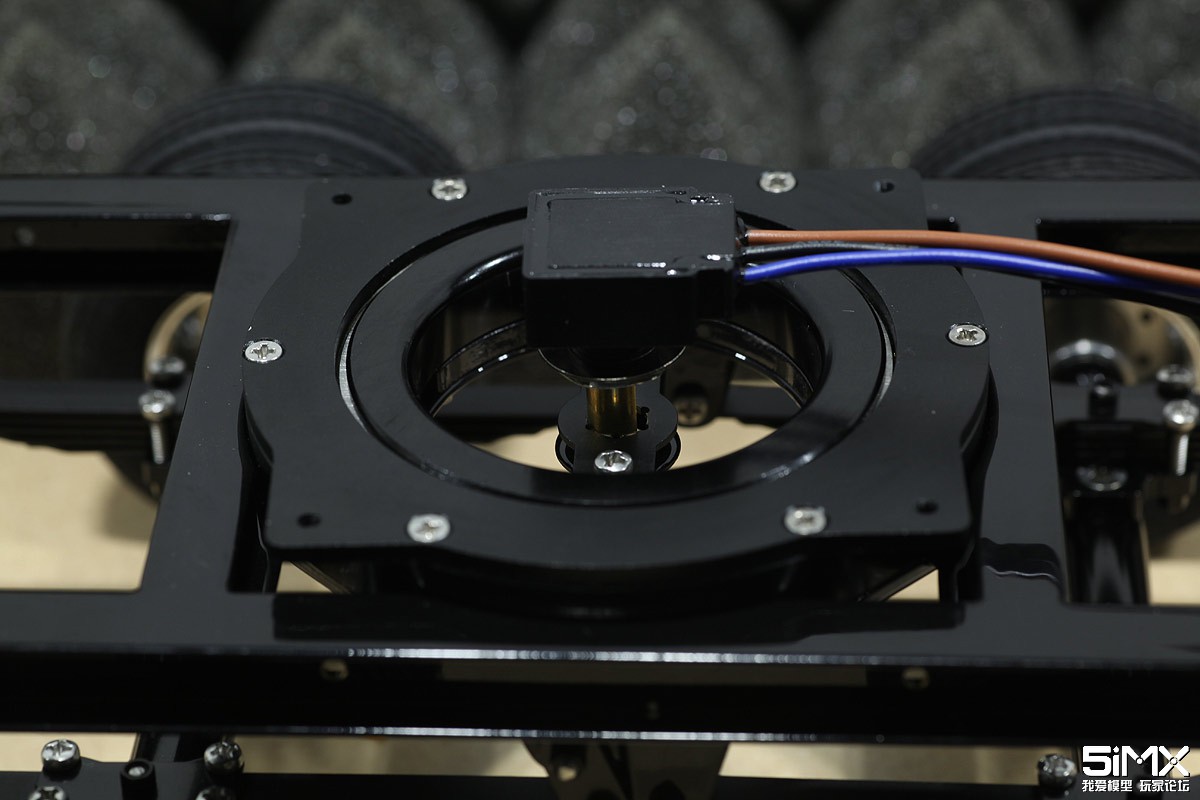
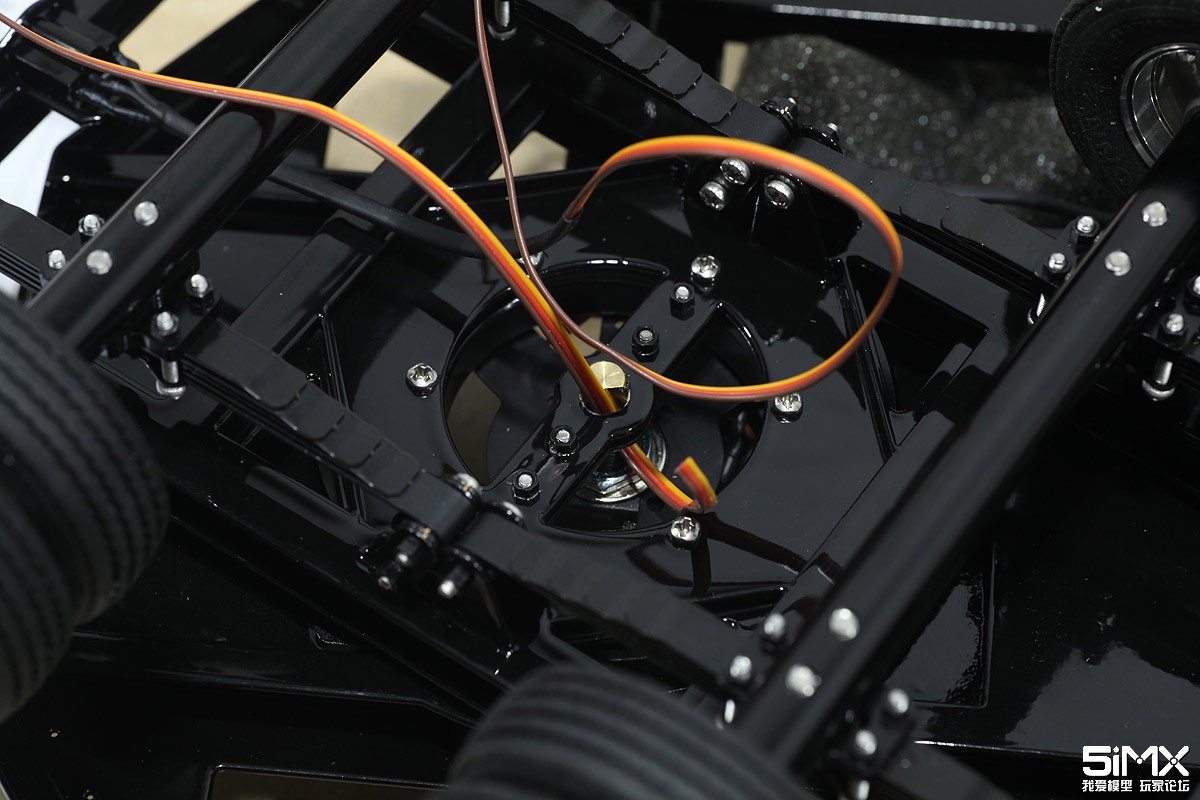
电位器的输出轴是6.0mm直径,而转盘下的连接点孔径也是6.0mm的,它们采用紧配合的方式就能连接。
这块固定电位器的十字支架也是ScaleART提供的,电位器通过专用胶水固定在支架上。不过一定要记得在固定位置之前调节好电位器的初始角度。
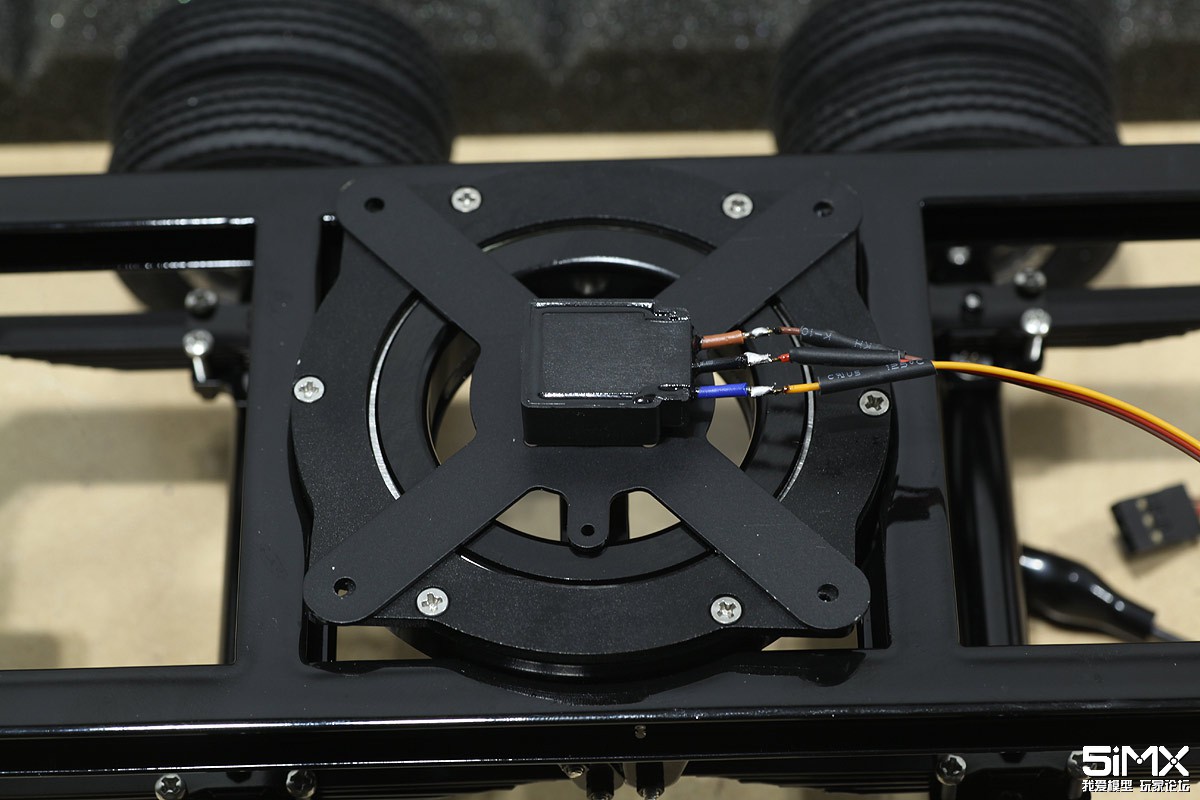
更换电位器的输出线
焊点套上热缩管
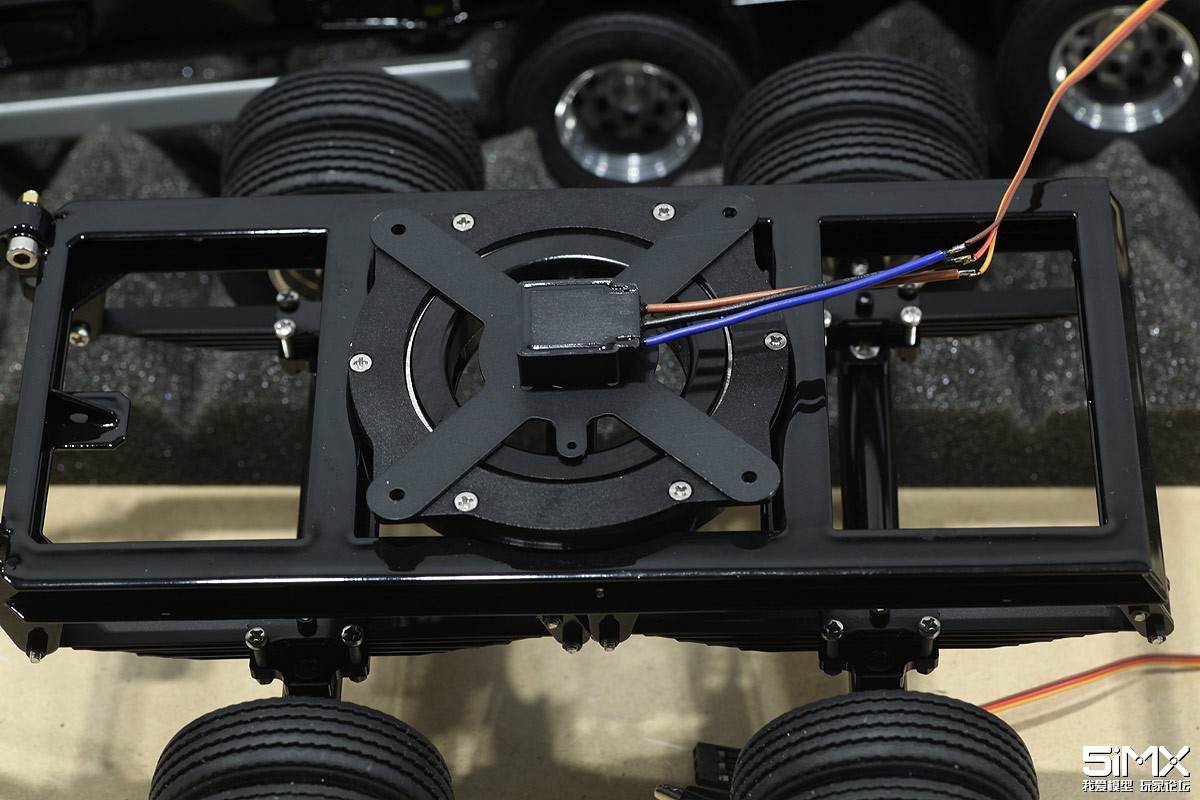
穿线
这里闹了一个乌龙,你看上图,这些线是穿到车架外面来了的。其实后来我发现在车架内部有隐藏的穿线孔,可以让这些线丝毫不暴露在外面。这个经验目前只好留着以后装车的时候再用了。
这是电位器在底盘下面的固定点

调节后电位器的角度
必须带电测试来确认正确的角度,前转向轴朝前时,最后那么转向桥应该是0度转向。此外,还要确认前转向轴和后转向桥的方向要互为反向,即:前面转左时,后面要转右。如果发现方向反了,可以互换电位器上1、3焊接点的线序来转换。

如果要让布线好看,难度就比较高。如果不那么讲究的话,布线就相对来说简单多了。
每穿过一个孔,就套上黑色的热缩管,这样线就不容易被暴露出来。
一共有5条线,要穿过这个直径只有2mm的孔。这个孔是我自己打的,后悔之处是应该打2.5mm的孔,这样穿线就容易多了。更后悔的一点是,当把线走完后才发现原本ScaleART就设计得有内部隐藏穿线孔!哈哈哈,实在是多此一举!
穿过这个孔后,这些线就可以穿到底盘内部进行走线了。
现在电位器的三根线就走到底盘的内部来了
然后连接一根舵机线,再套上热缩管。

最后把这条线插在POTI端口上(见上图蓝圈中poti的标识)
第八章 整理布线
布线是ScaleART模型在组装过程里难度非常大的环节之一。为了布线的美观,通常会更换原装的线材。
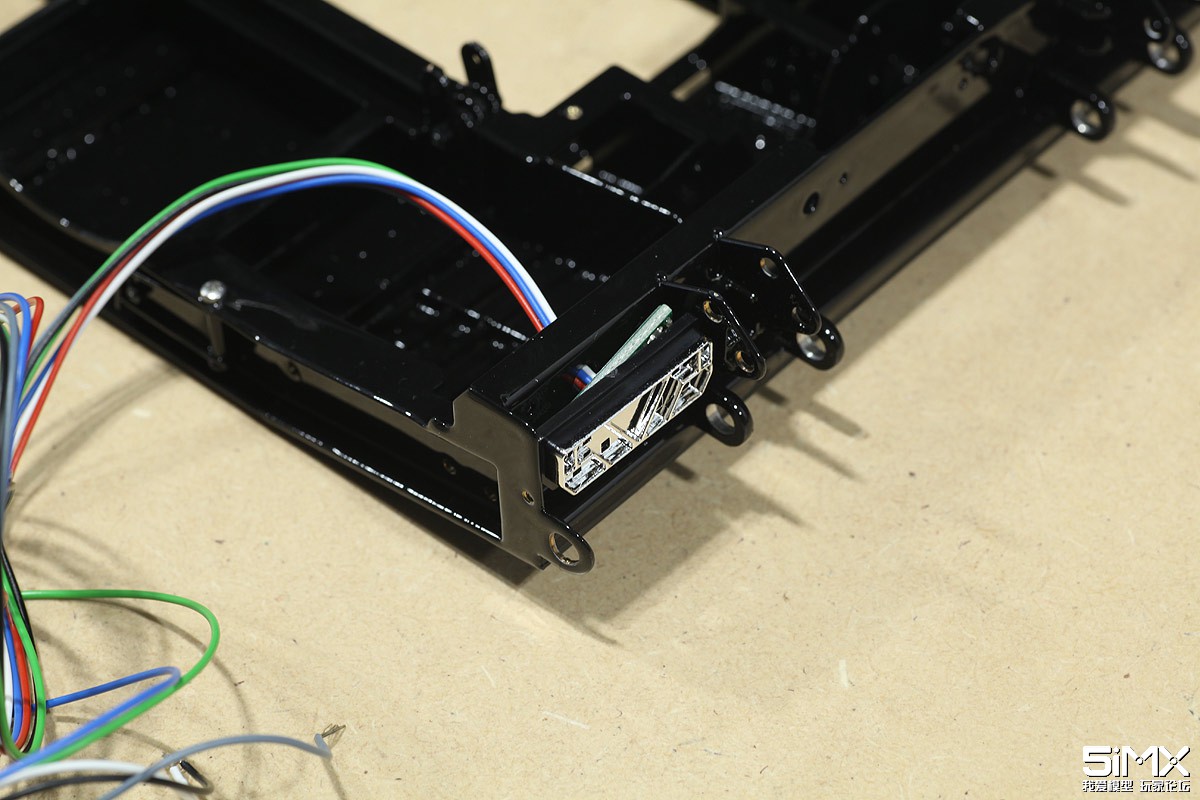
上图所示为ScaleART平板拖车的红外线接收器,使用双面胶就可以固定在上图所示的位置。
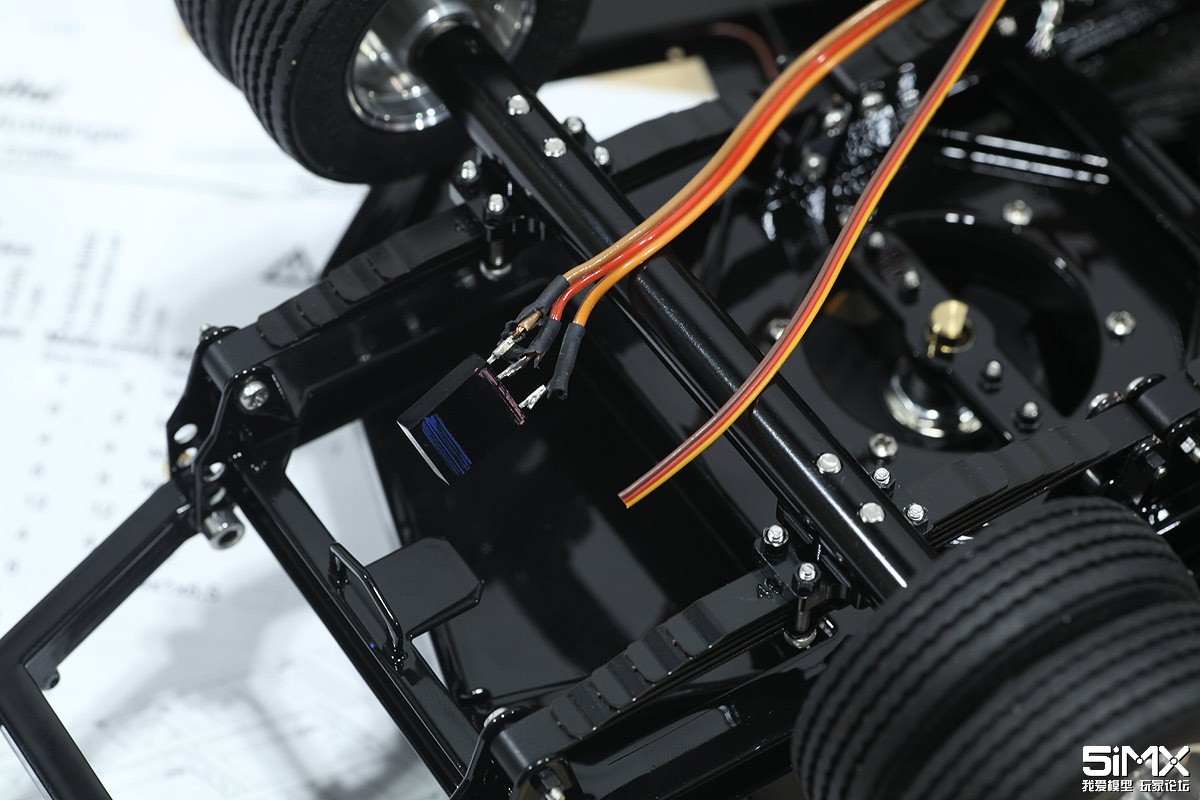
然而原配的线粗度较大,布线困难。
为了解决布线难的问题,特意更换成了较细的三色线。
暴露的部分套上热缩管作黑化处理
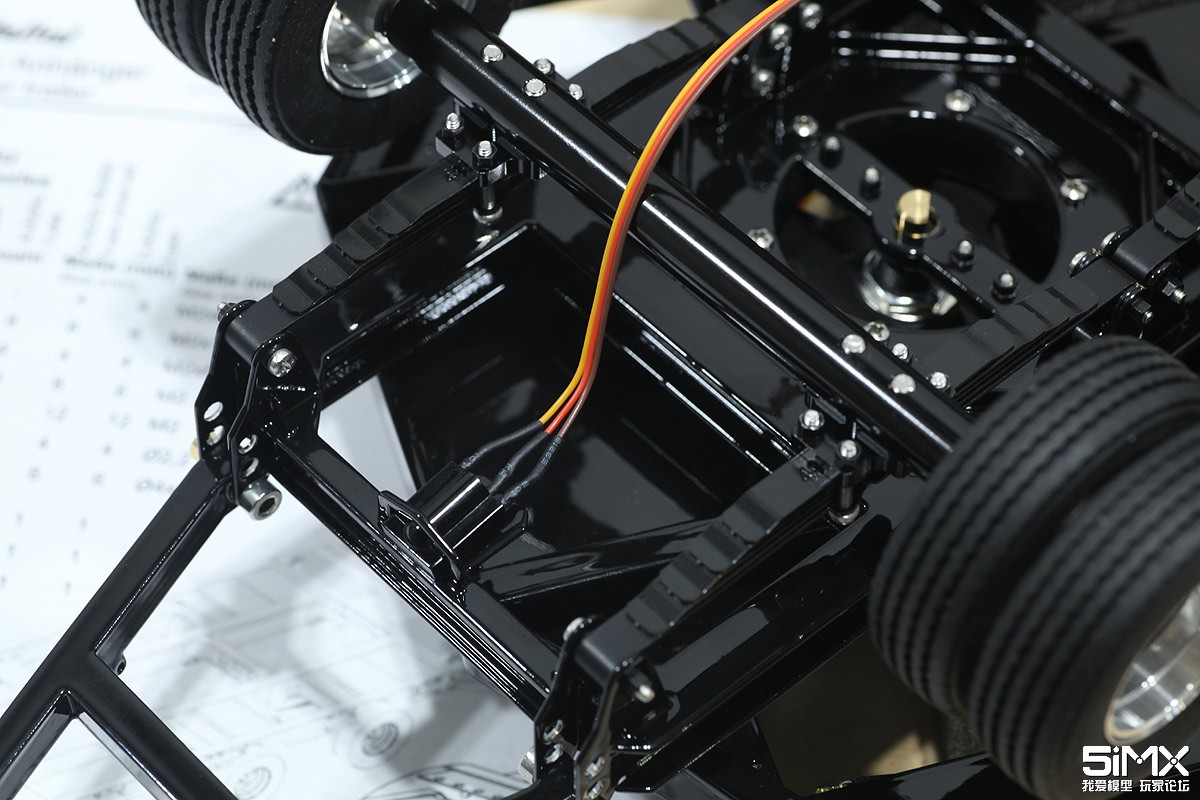
电线从电位器输出轴的扁位缝隙中穿过去
从另一头穿出来
线材已经穿到了上层车架,然后把暴露的部分用热缩管黑化处理。

把三色线分别撕开,以便于穿孔。
这个孔极度难穿
但最终还是穿过去了

线走到车架内部时,就可以放松了。
连接好舵机插头线
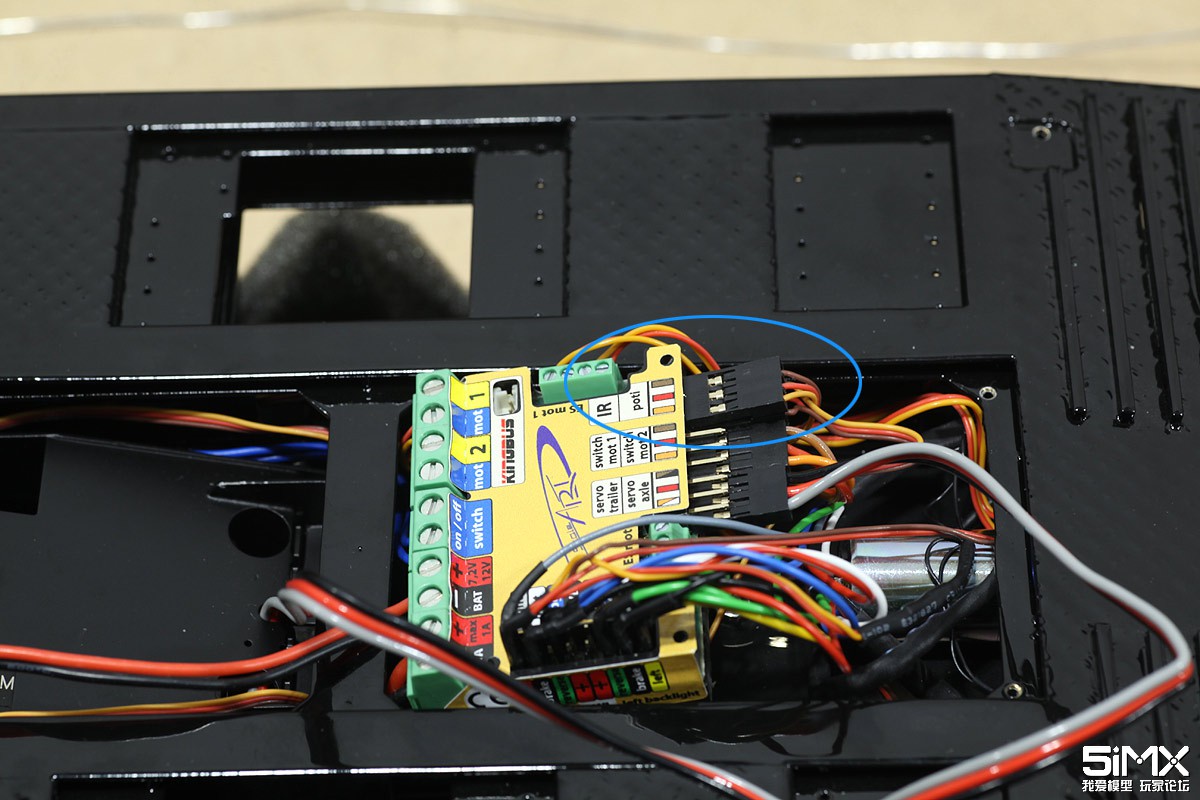
然后接到IR端口上(上图蓝圈所示)

调整好线的角度和长度,避免阻碍旋转。

盖上盖板,就完成了!

优化一下随动转向结构。之前用的十字舵盘质地较为柔软,驱动时变形的情况难免。我把这个零件换成了圆形舵盘,这个舵盘来自于Futaba的舵机零件。依照前文所述的方法安装好法兰轴承。
打好连杆连接孔
安装就位

将舵机一级驱动臂也更换成金属臂以加强精度。
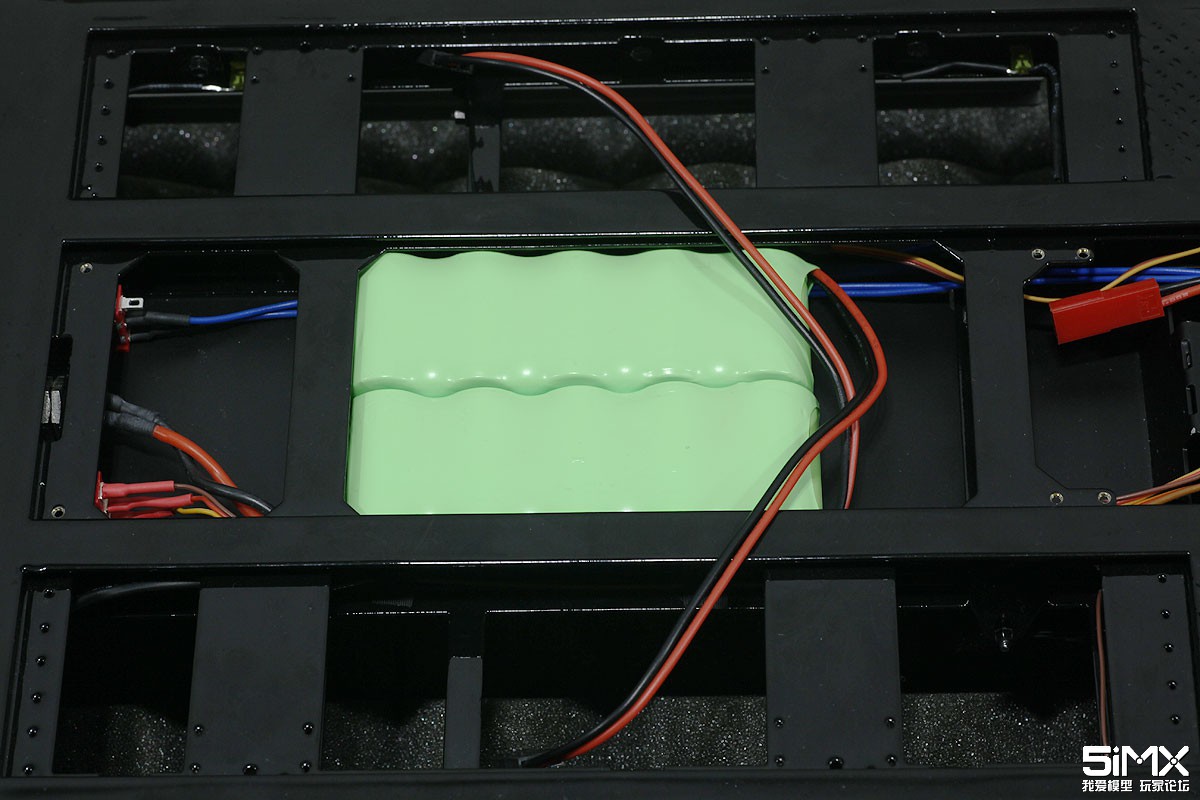
定制的电池也收到了,每5颗电芯为一组,共两组,串联,组成12V电源。
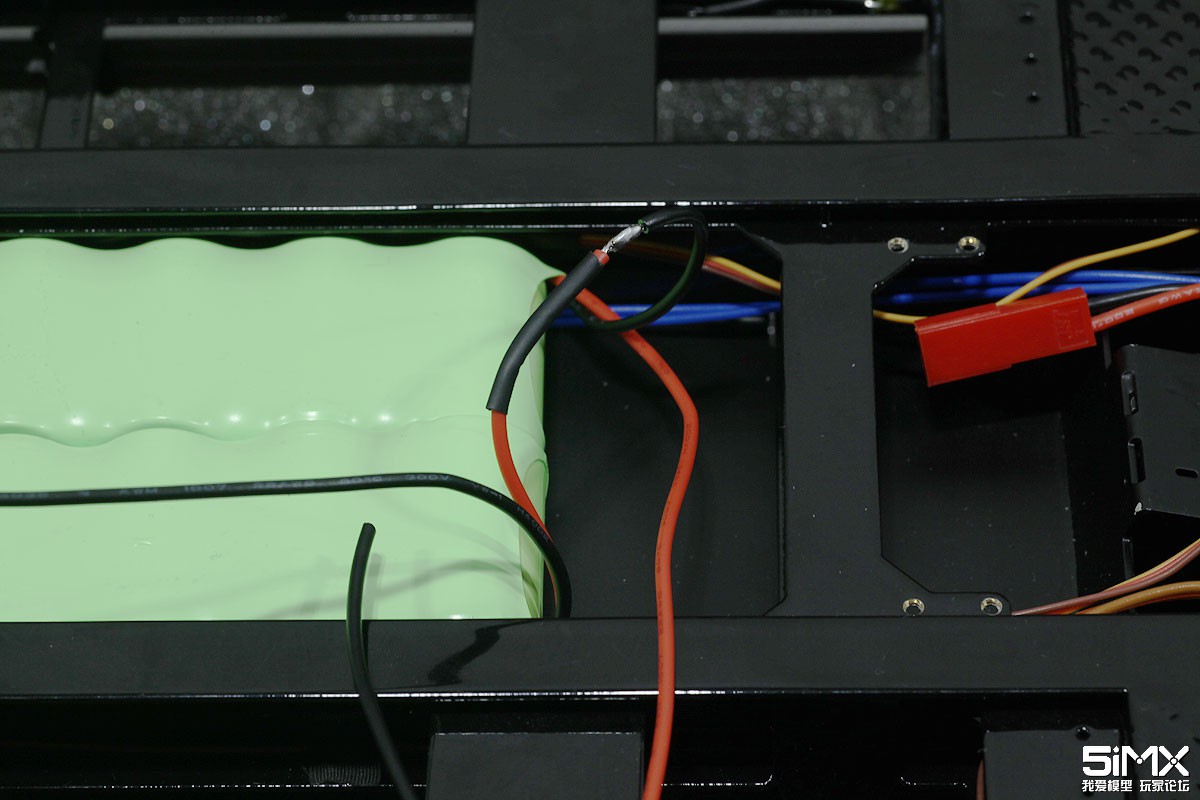
开始进行两组电池串联改造
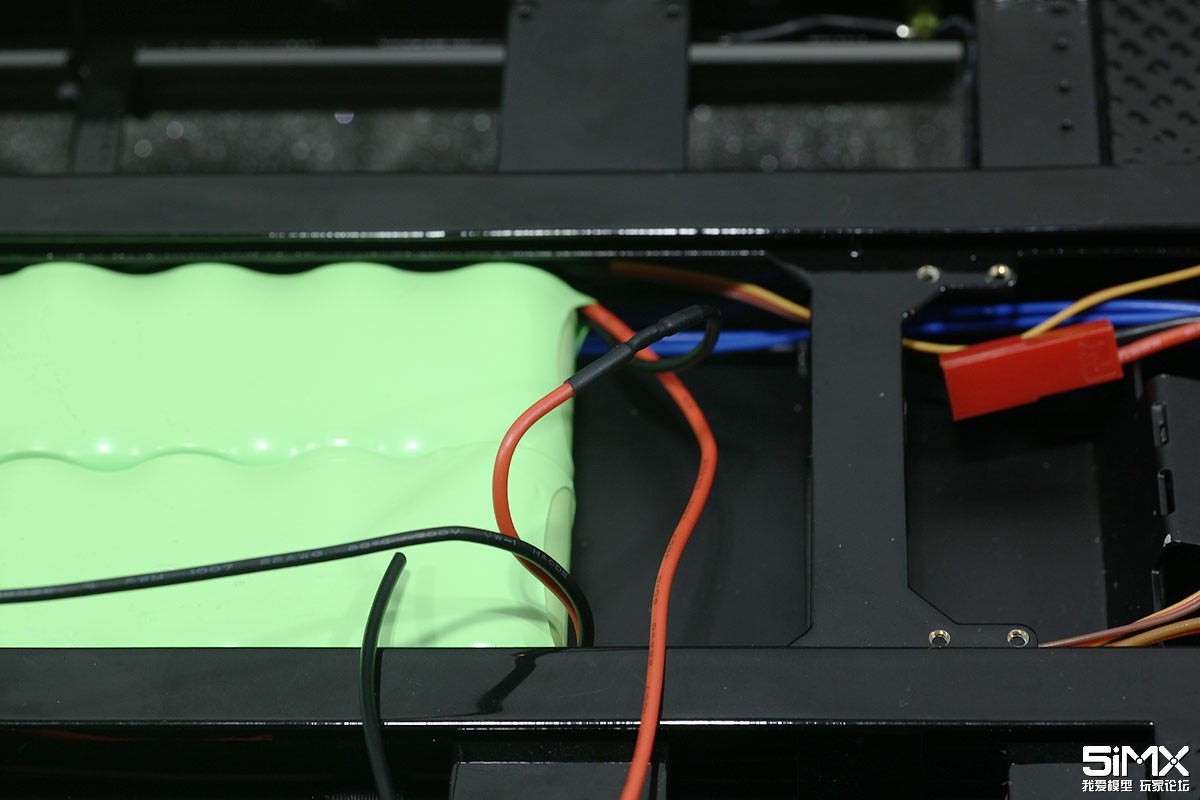
负接正
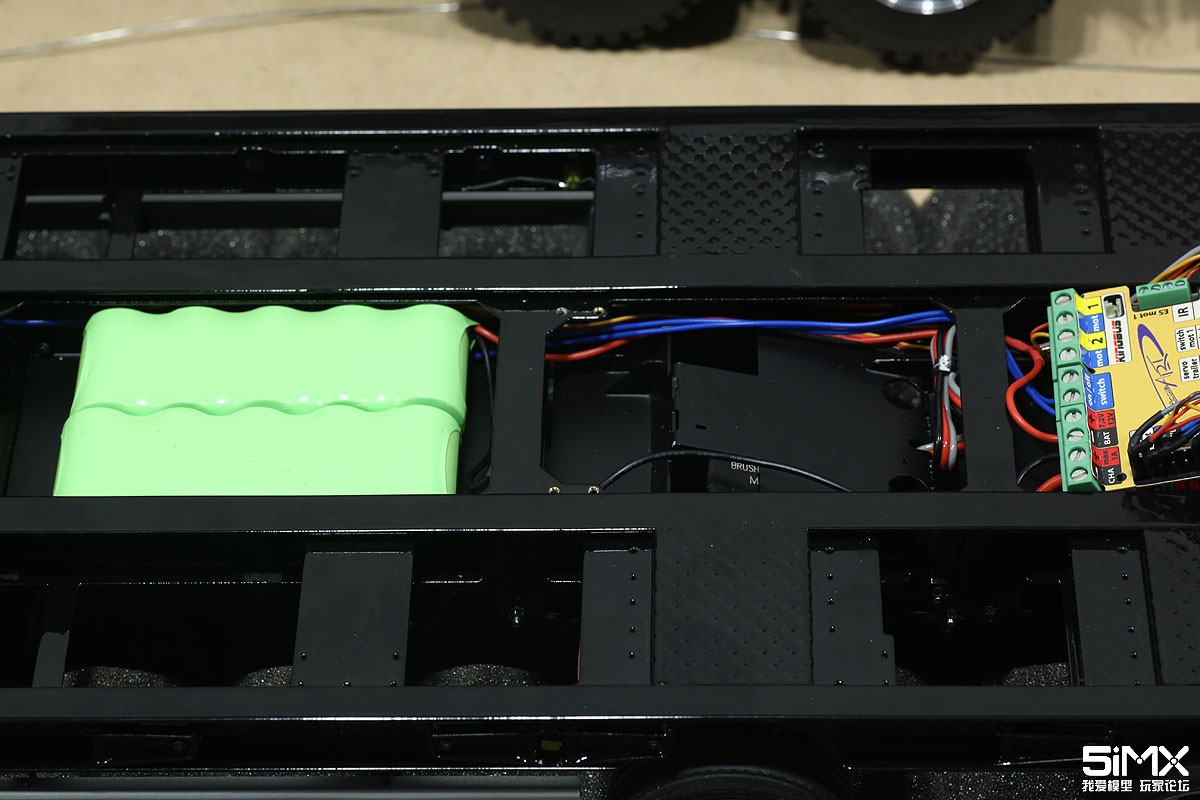
连接到控制器的BAT端口
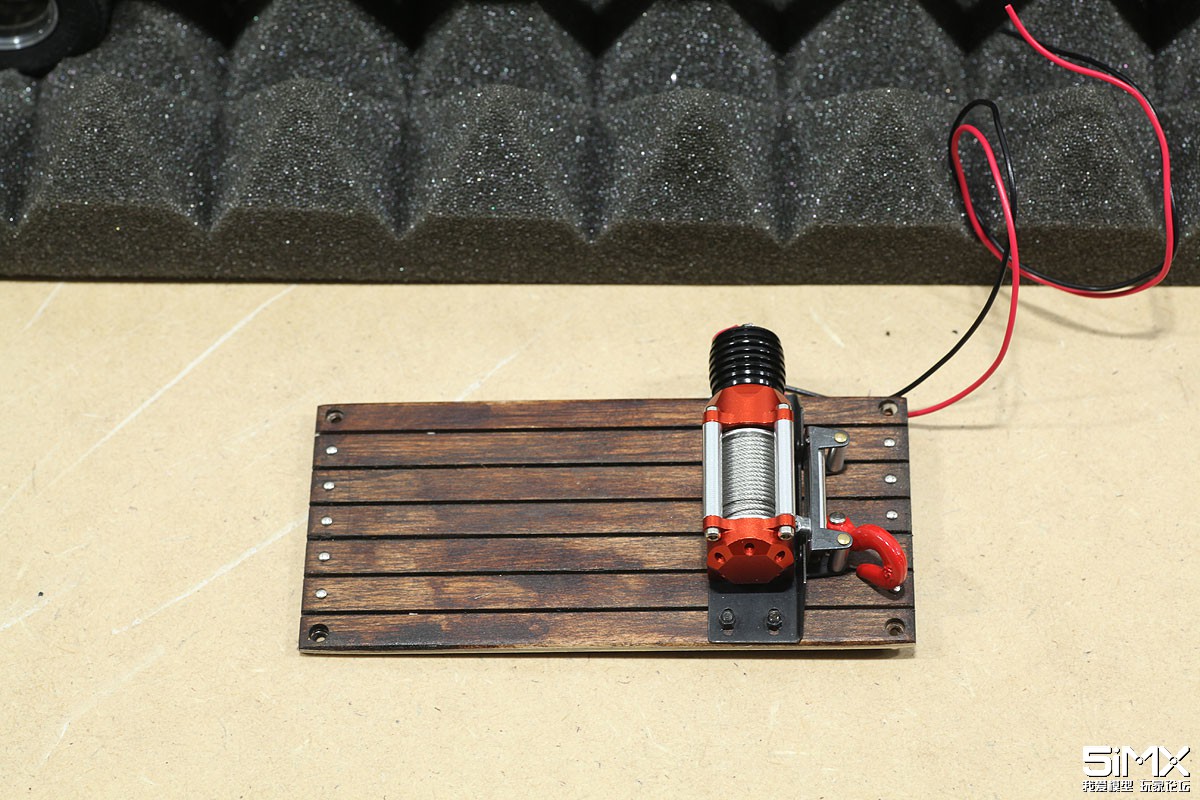
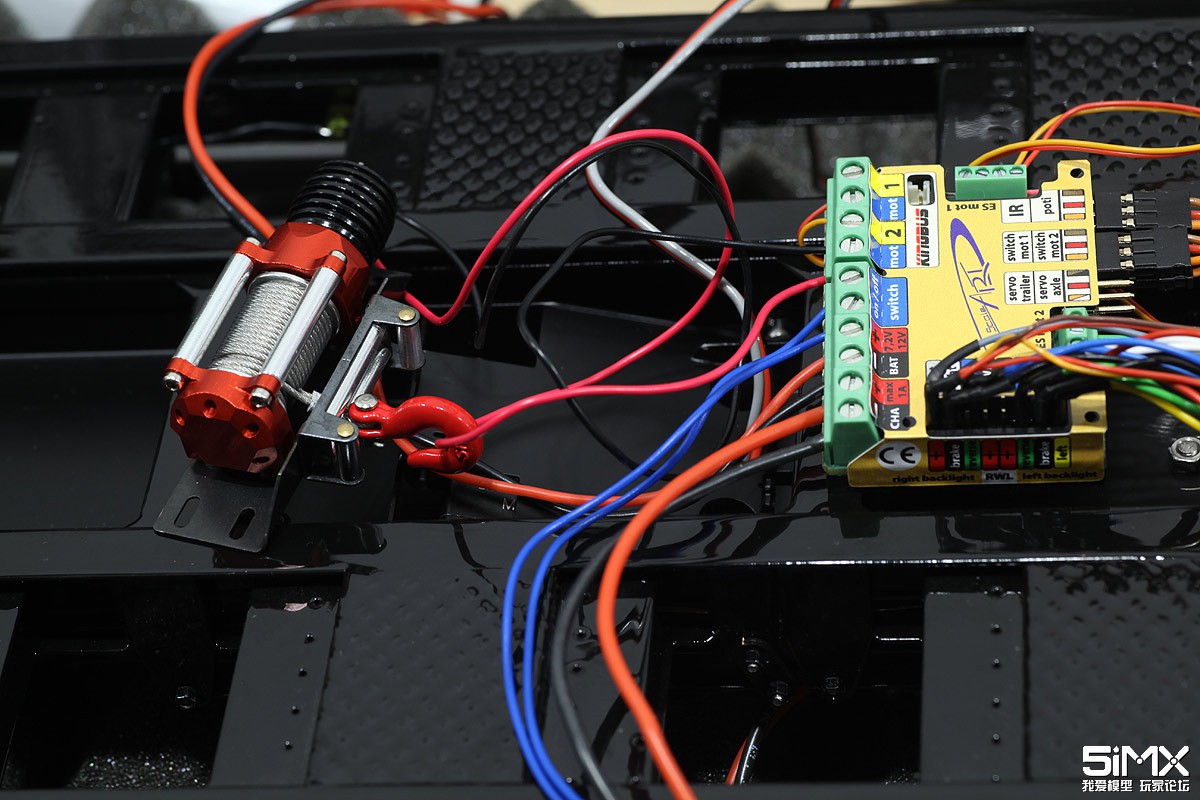
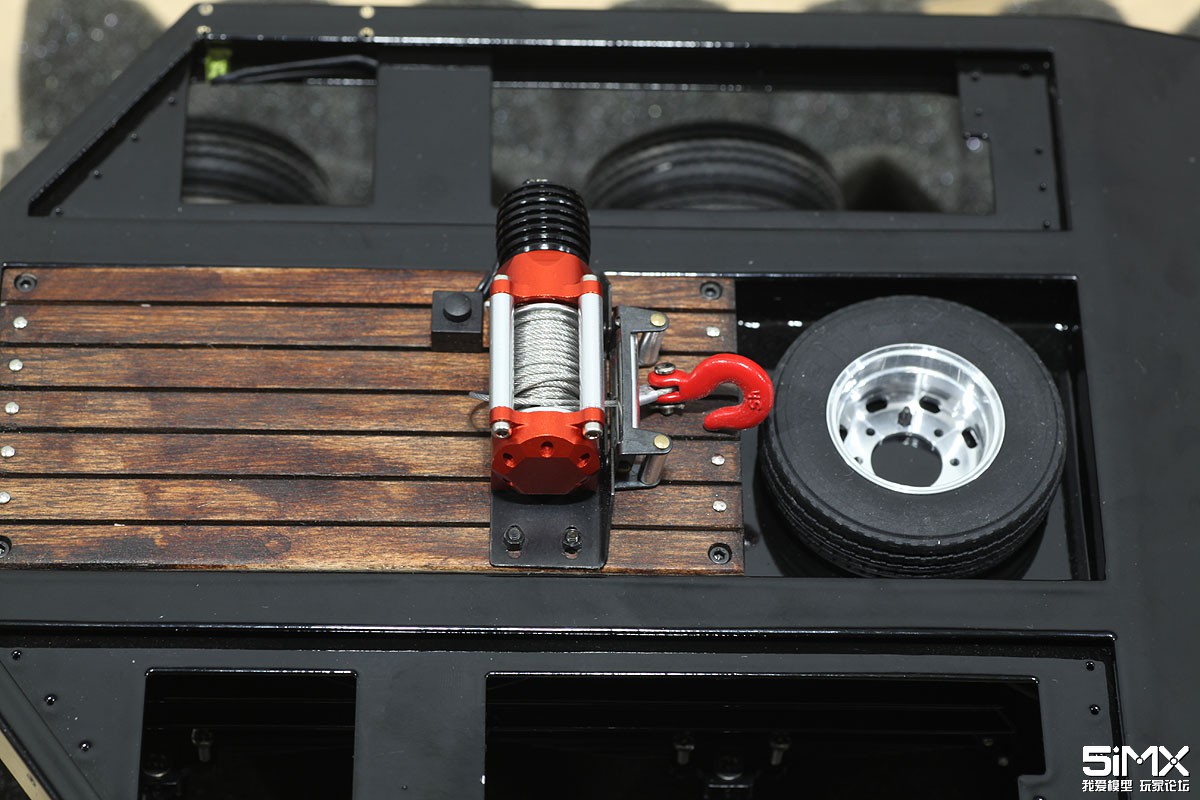
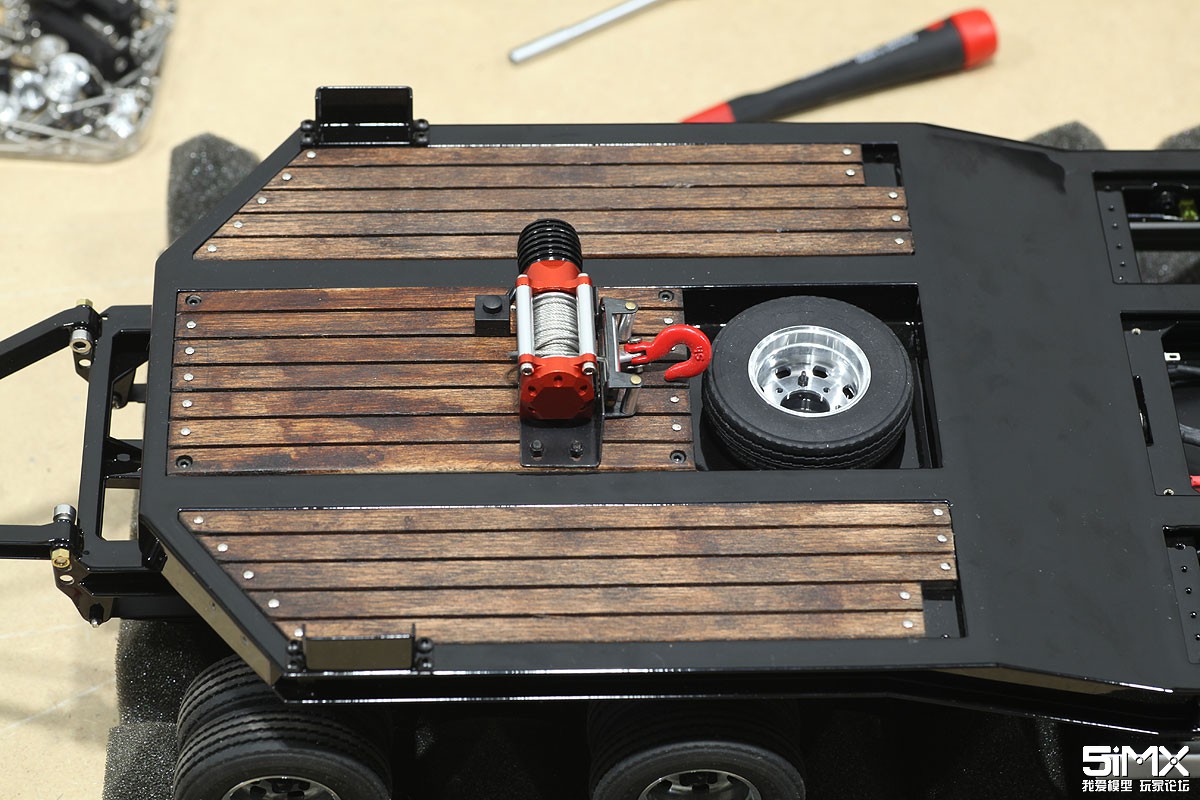
手上刚好有一个ScaleART的绞盘,这里正好派上用场。

为绞盘供电的电源线我使用的是高频馈线,一条线内有两股线,外观是黑色,简洁又美观。
高频馈线比较贵,不暴露的部分我采用了普通的细线以节省成本,虽然这点成本微不足道,但这就是一种态度。

焊上转换线
连接到控制器的MOT2端口
把绞盘驱动线引到前面来
为保险起见,给绞盘安装一个电源开关,只有打开了这个开关,绞盘才会工作。




绞盘的开关、电源线的处理步骤如上,大家慢慢看。
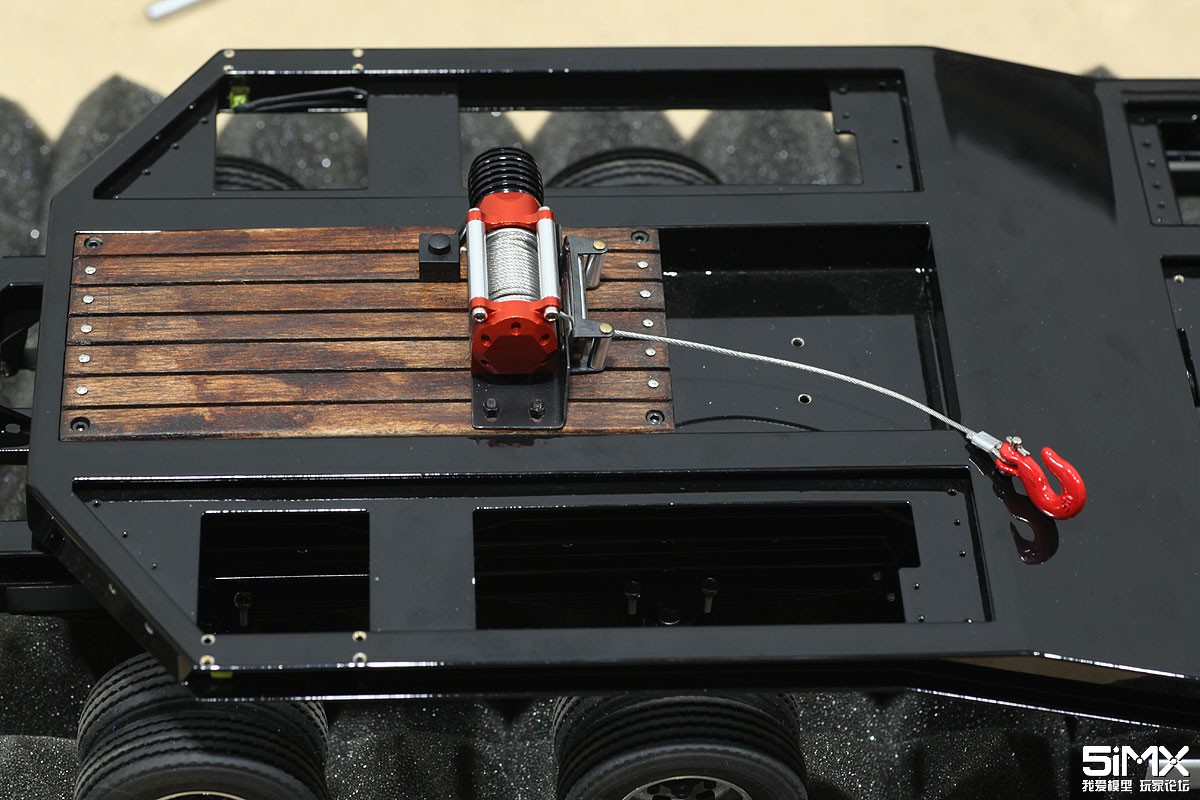
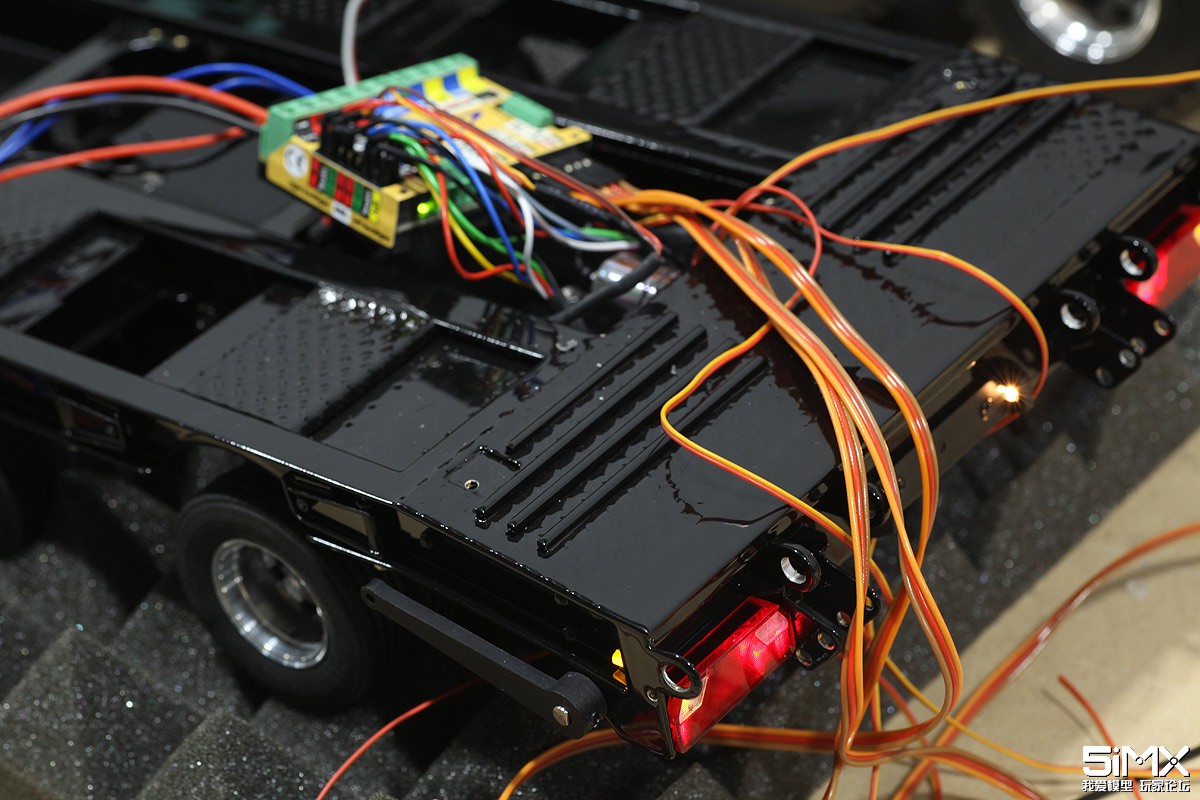
布线完成后就把板子安装到车架上。
特写
把前面的板全部装完
第九章 拖板木板的安装

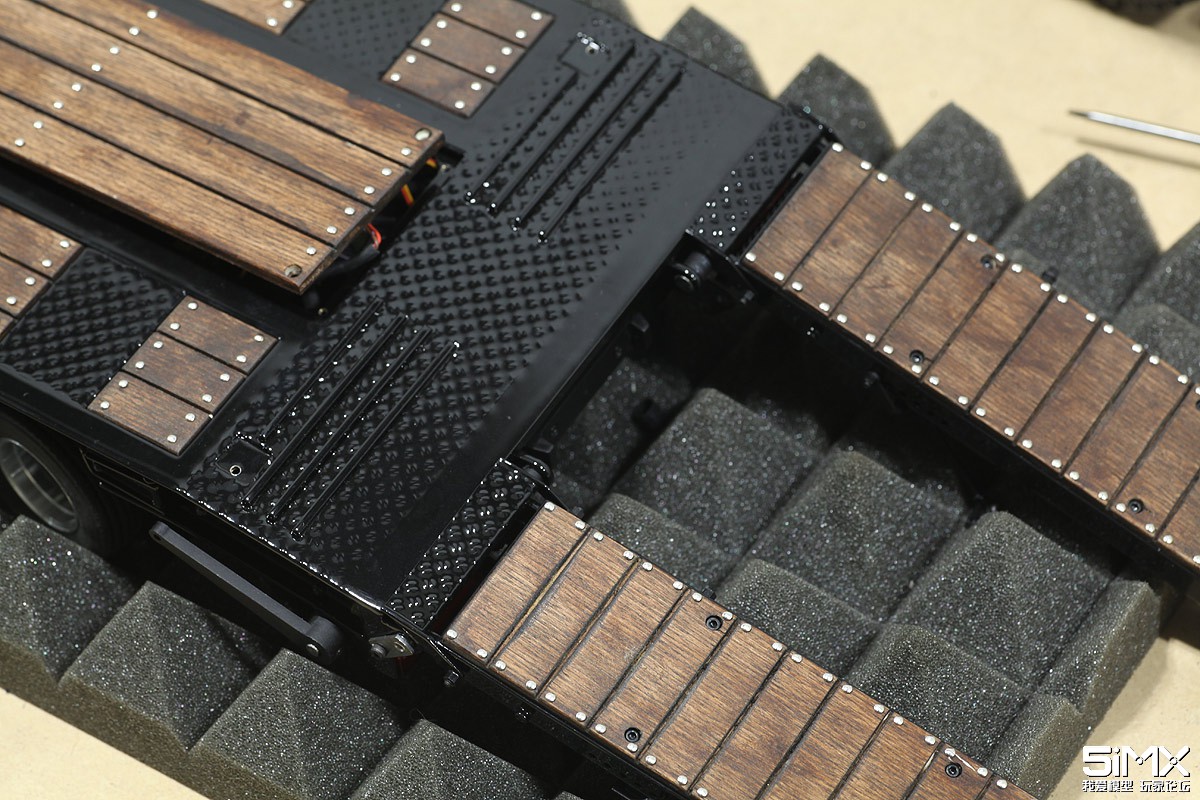
把中部的木板安装好,这些木板是实木材料的,表面有原厂的旧化涂装处理。

尾部的木板安装,设备仓的板暂时不安装。

拖车设计有加宽板,当运输挖机时,这块加宽板会发挥不小的作用。

平时不用加宽板时,就把板材放置在车头的固定栏内。

车头的警示标

安装完成后的样子
第十章 上车尾板的安装

拖车的尾板有不少细碎的零件,这些零件全部是铜质的,表面进行了油漆喷涂处理。


两个尾板的背面

正面,安装上木板。

准备好轴销
安装完成
收起来
还差两个旋转灯没有装,SA漏发了。

贴上警示标
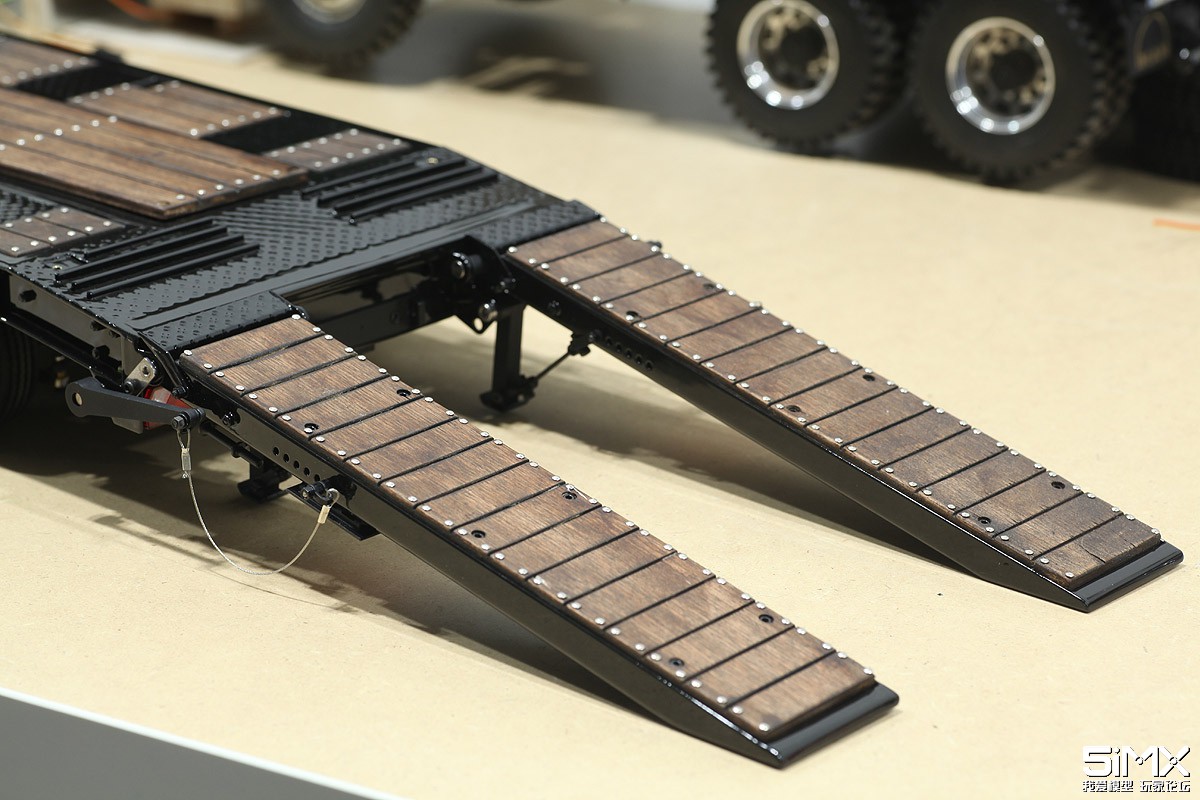
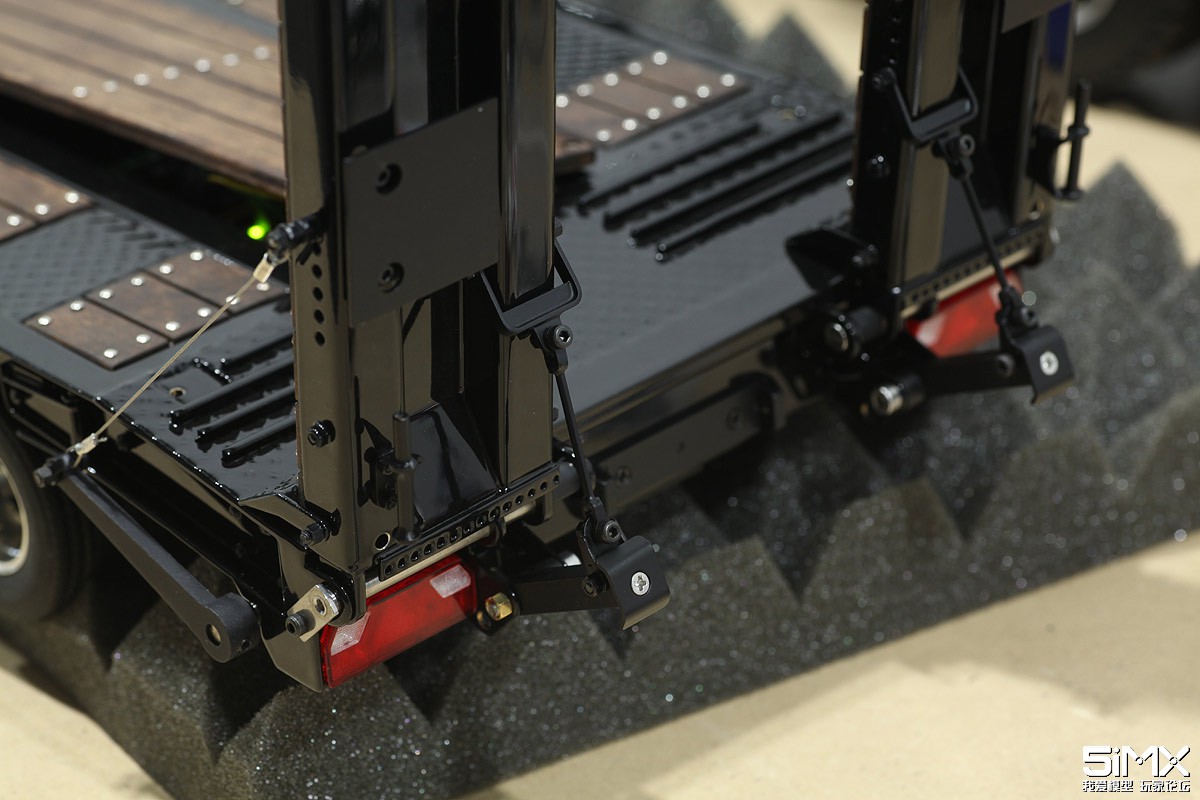
尾板放下时的状态
尾板的控制方法有两种:
1. 板车提供了一个开关,可以手动控制
2. 用遥控器控制,通过牵引车接收机接收控制信号,再通过红外线把控制信号转发给拖板,然后执行

尾桥可以随前面的转向桥随动转向
第十一章 细节安装

再来安装一些细碎的小零件
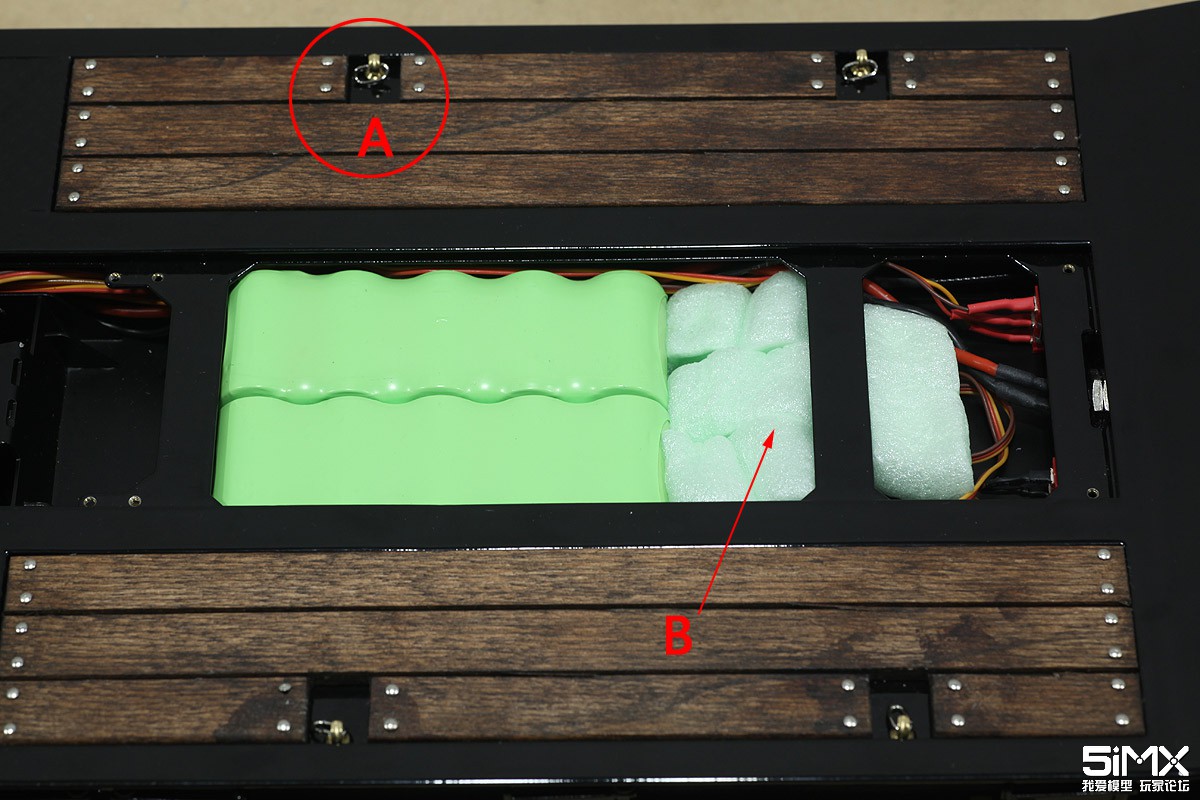
把上面这个零件安装在A位置和其他相应的位置,B位置填充泡沫颗粒防止电池滑动。

盖上电池板,完美隐形!
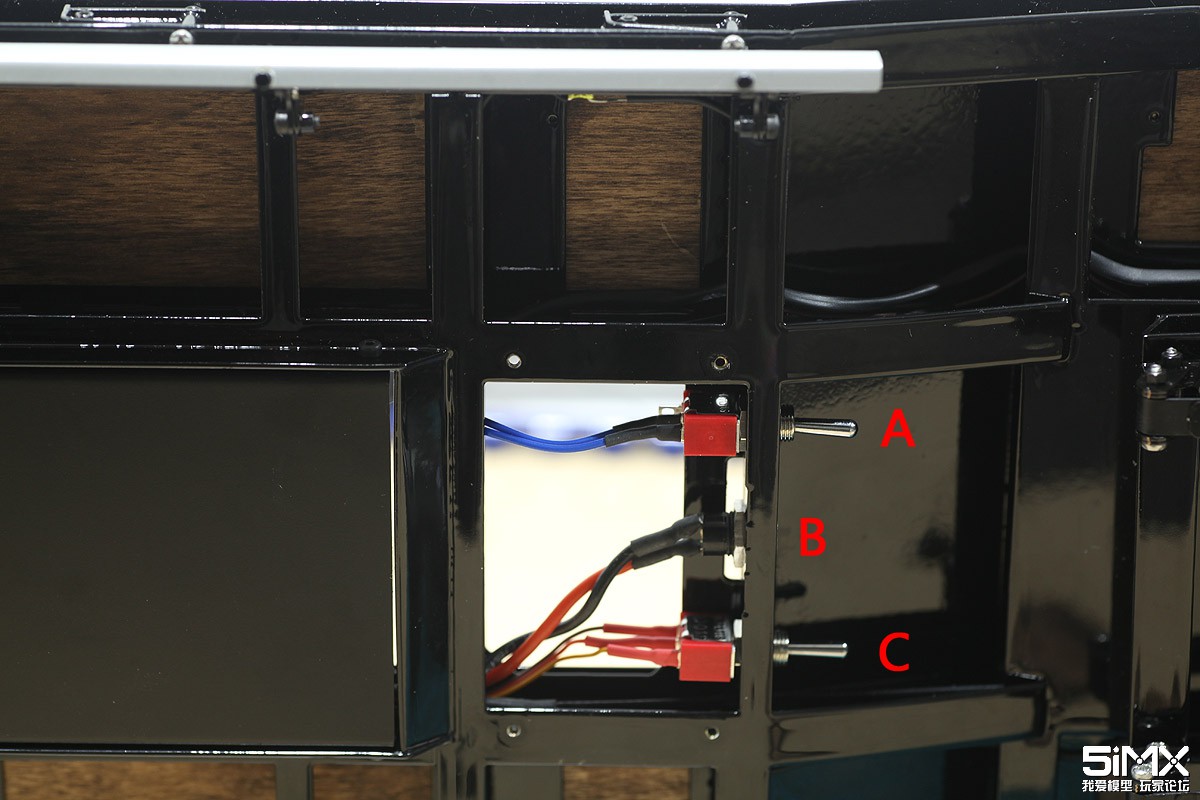
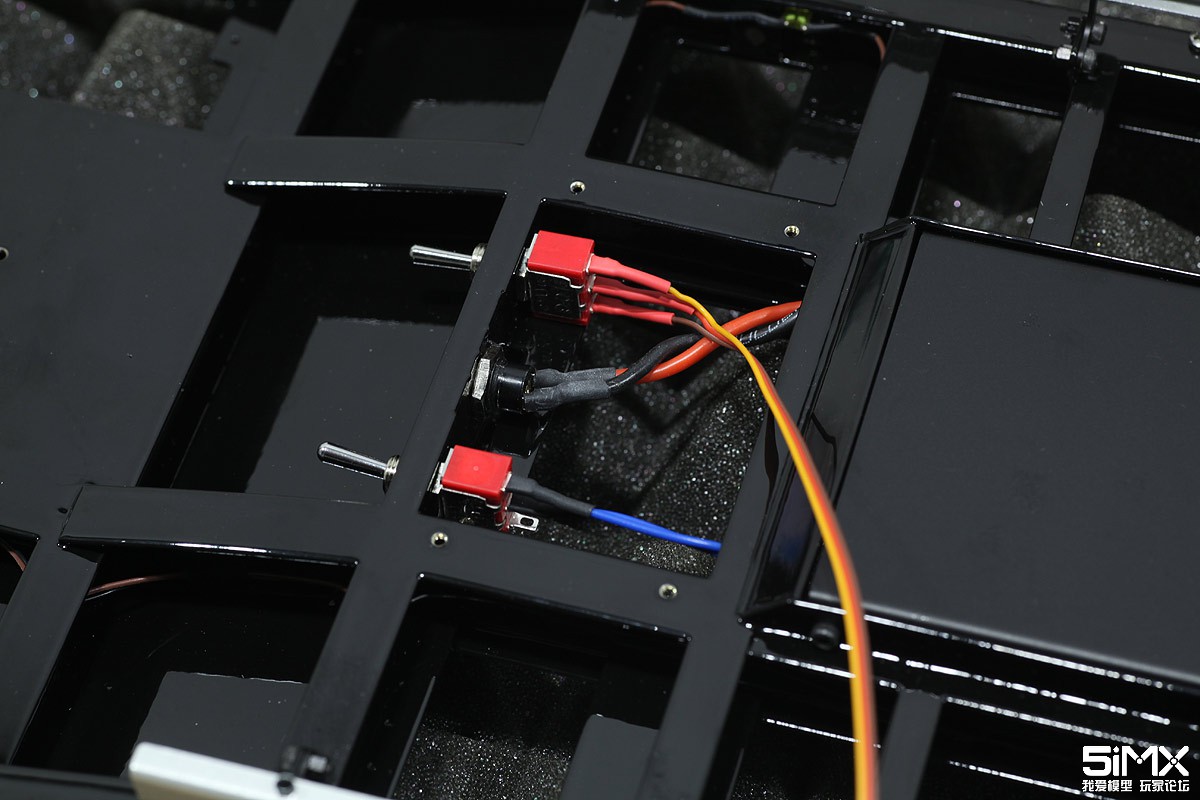
在拖板的底盘下面,SA预留了三个孔位,分别用于安装电源开关、充电插口、功能开关。以上图的安装为例,A是电源开关、B是充电插口、C是尾板收放开关。其中A开关为单向无锁开关,拨一下短时导通开机,长时间导通关机。C为双向无锁自复位开关,也就是说可以上下拨,松手后拨杆能自回中。上拨是放尾板,下拨是收尾板。由于我在这台拖车上增加了绞盘功能,校盘的正转反转就需要一个单独的开关来控制。而上边的A、B、C三个位置都被占用了,新增的功能开关没有安装位。
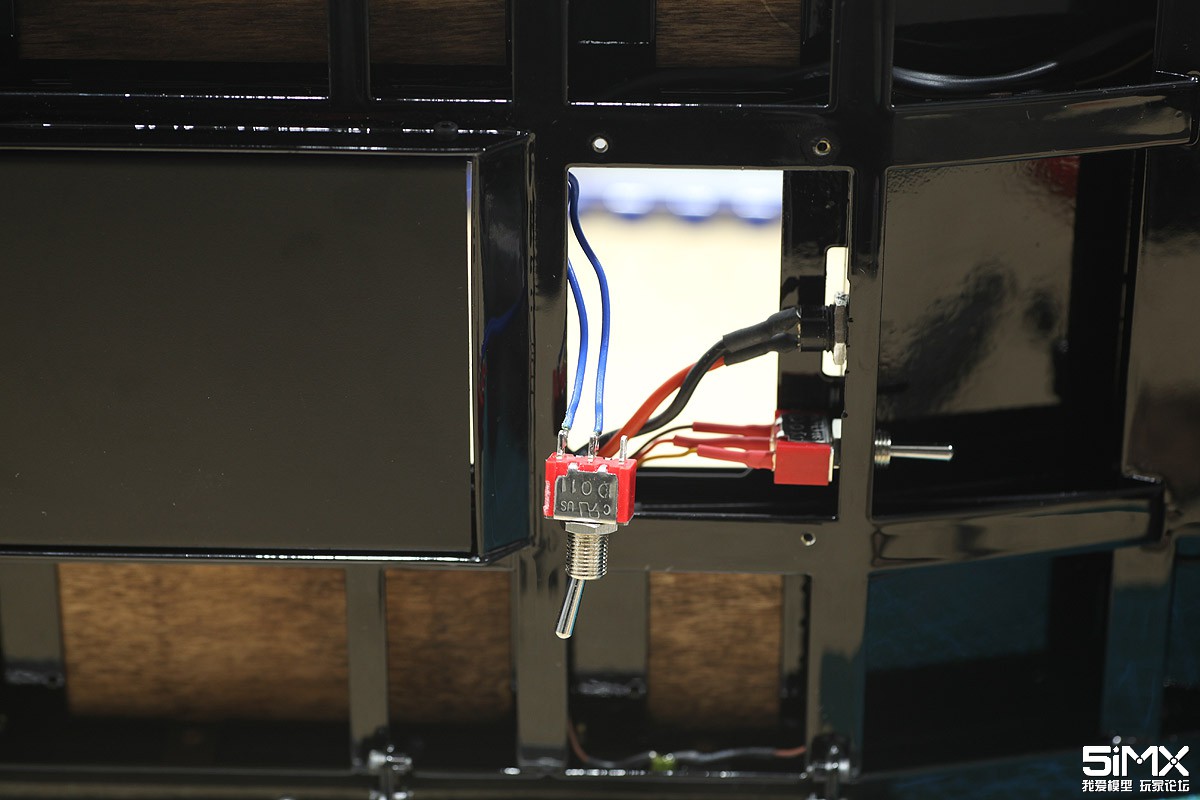
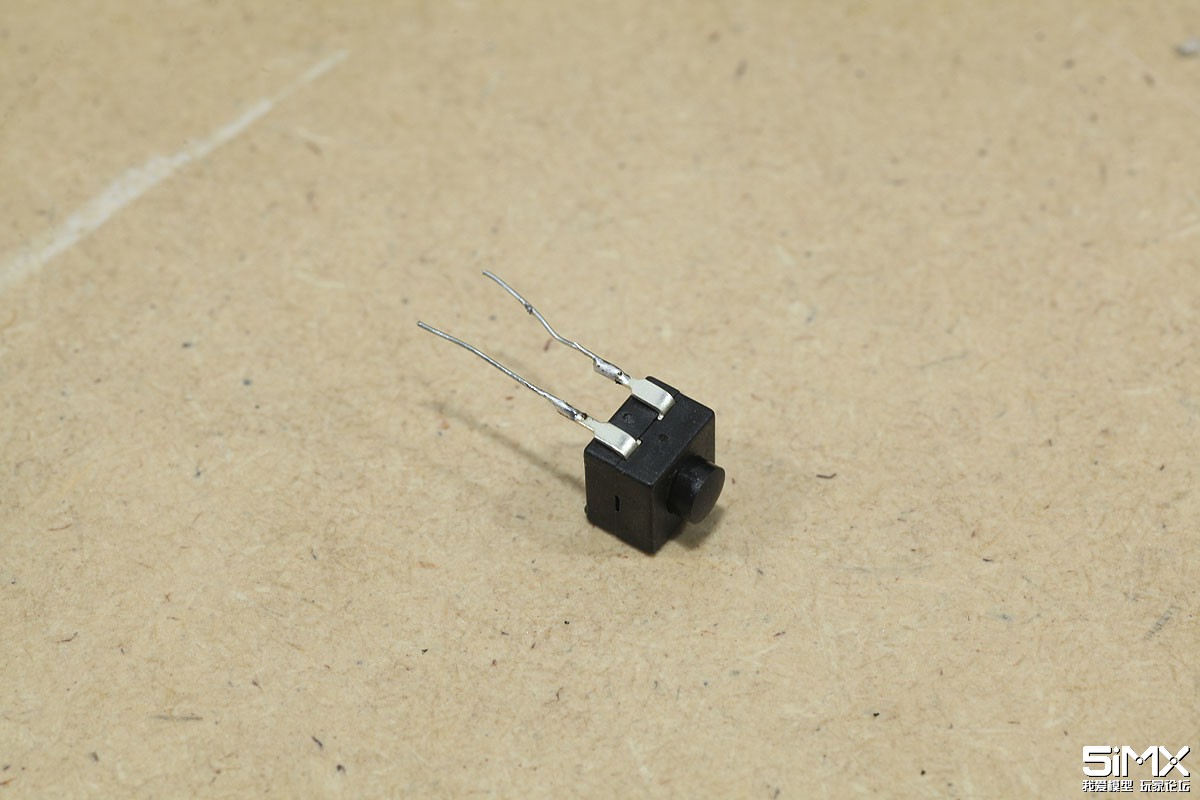
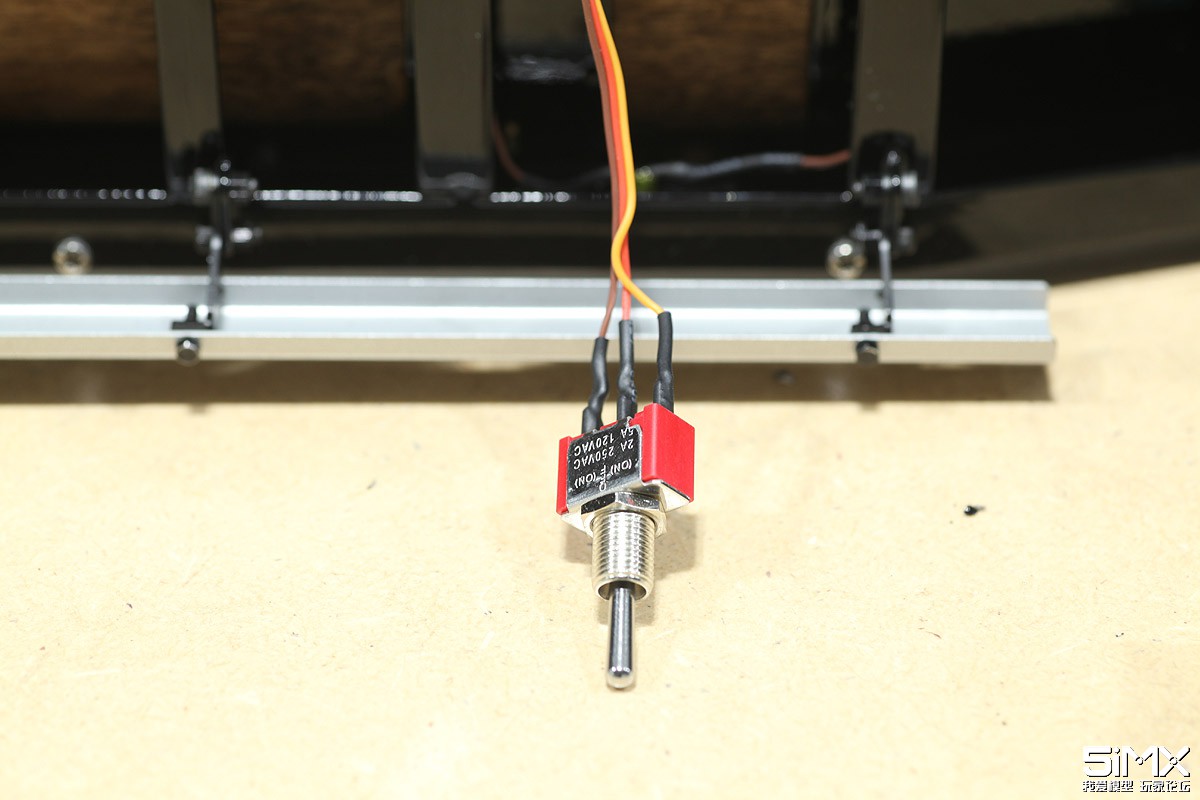
我采用的办法是拆掉原来的拨动式电源开关,改为轻触式开关。

这就是微型轻触式开关,无自锁功能。按下导通,松手断开。

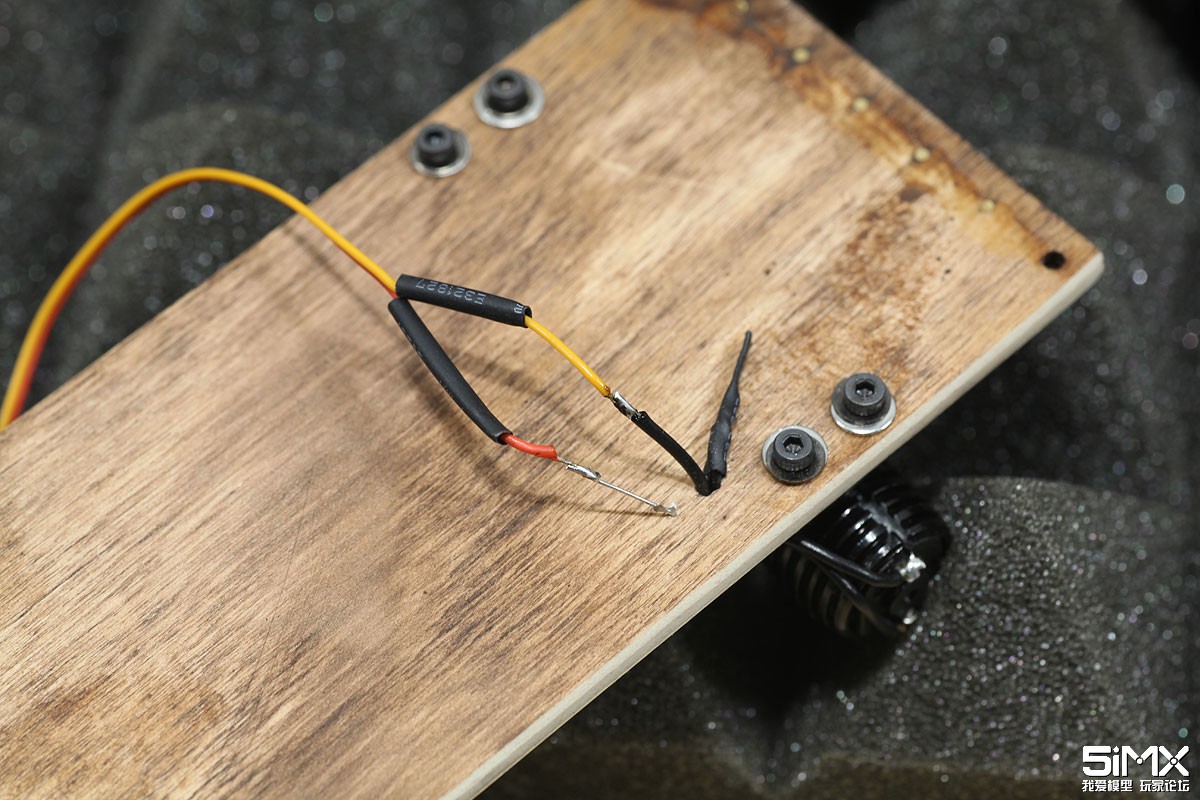
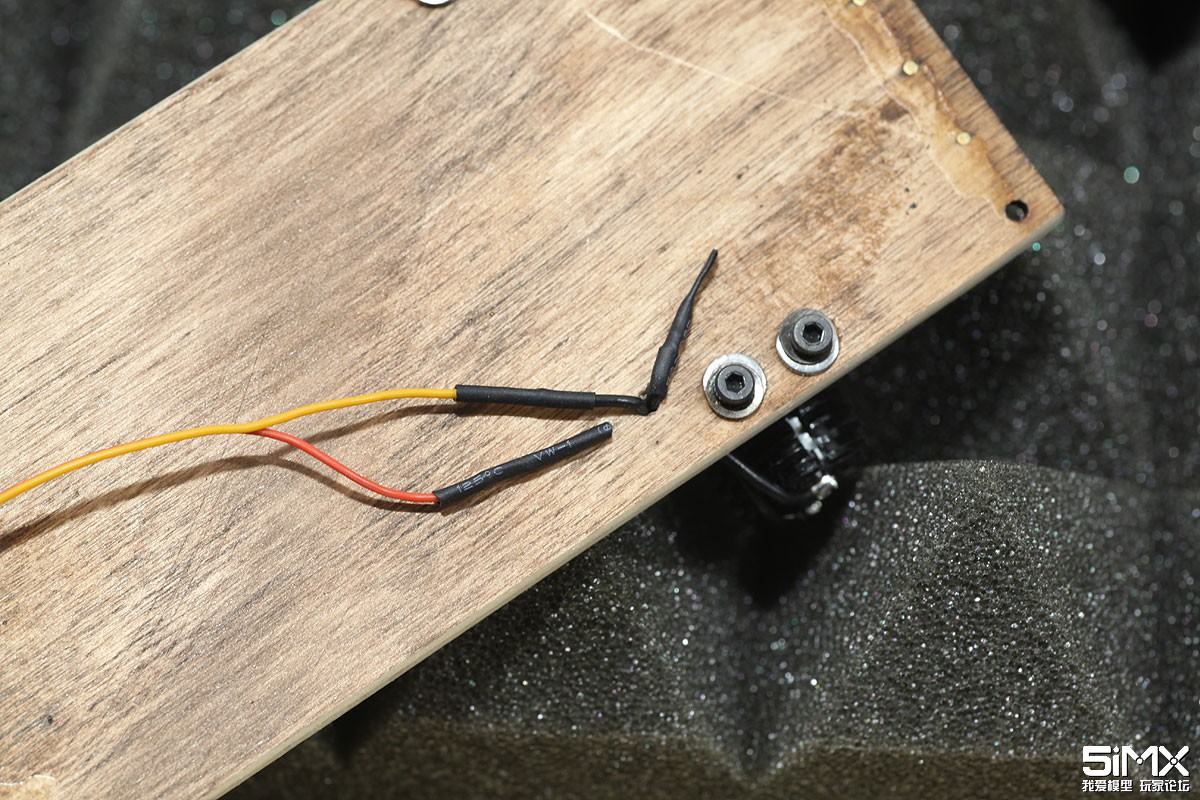
把原来的开关线焊在轻触开关上

焊接点套上热缩管
再把开关用双面胶粘贴在底盘上,操作既方便又隐蔽,不影响美观。
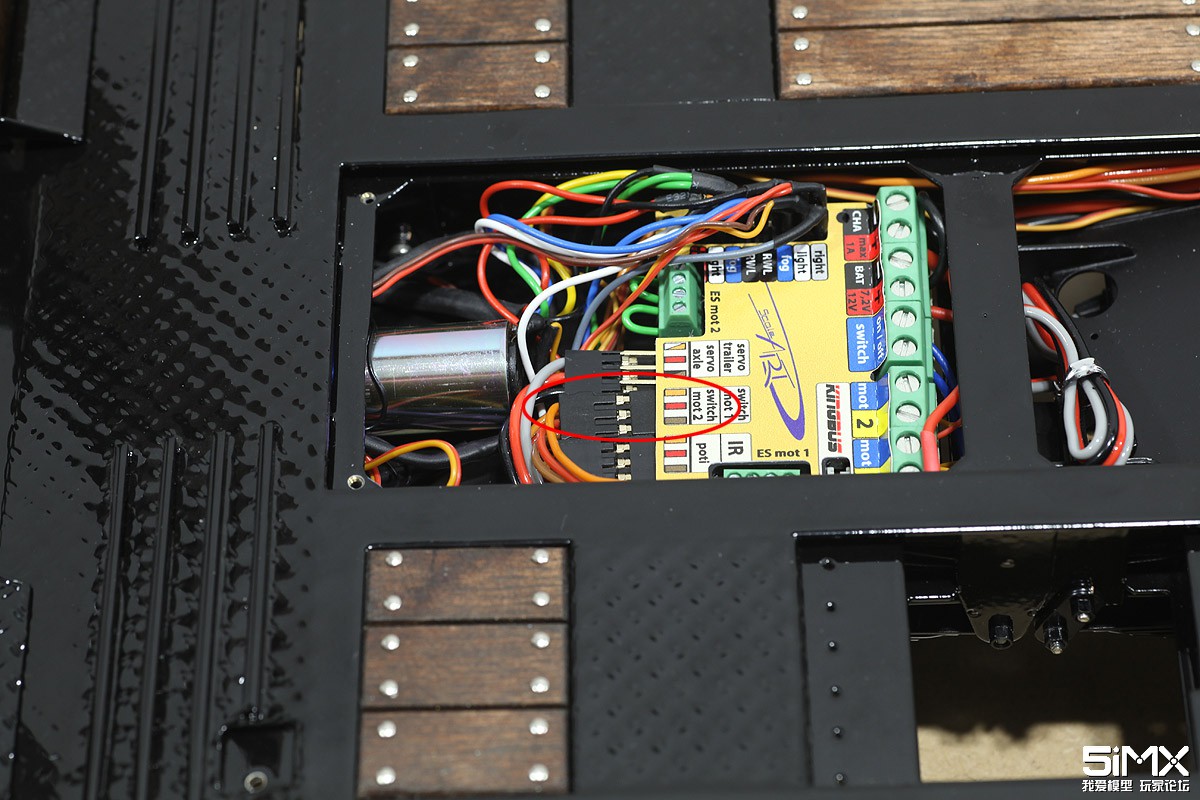
见上图红圈位,Switch Mot 2端口就是控制绞盘正反转的开关端口。左右导通,分别对应绞盘的收和放两个动作。

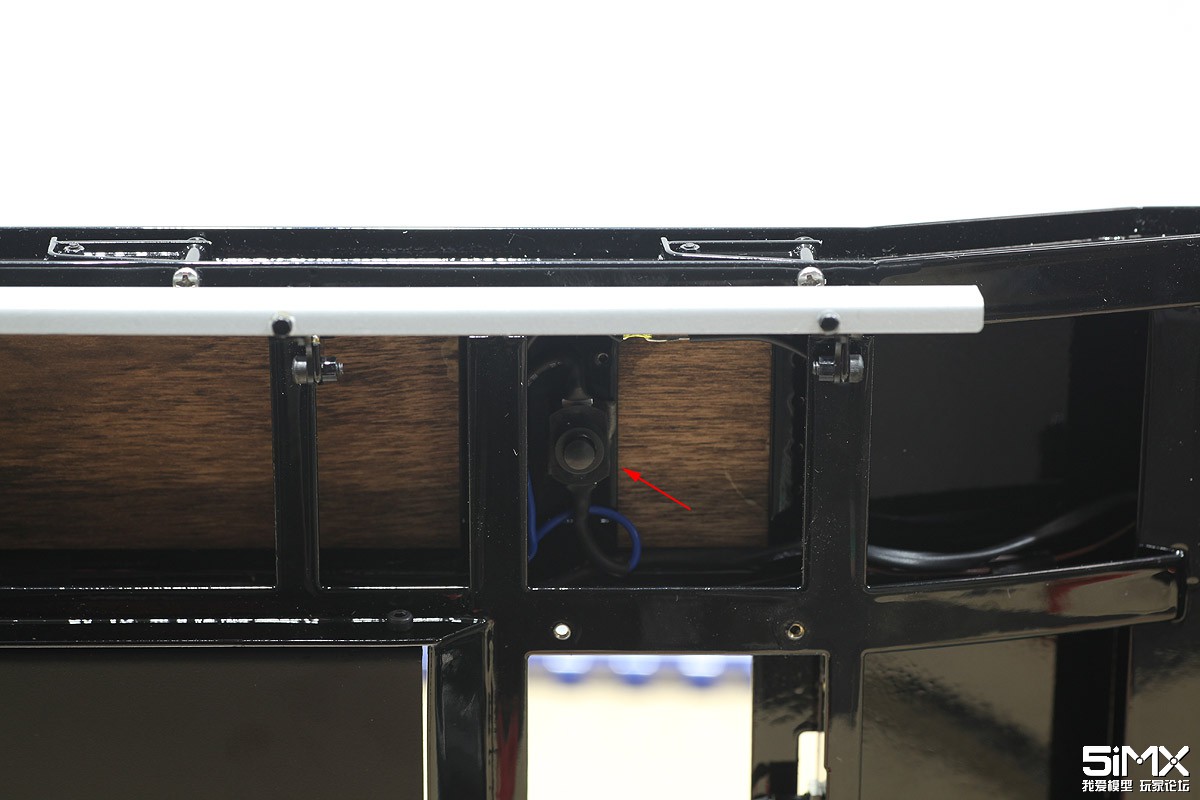
使用舵机线把3Pin接线端口延长到车头开关盒的位置。
焊接好自复位开关
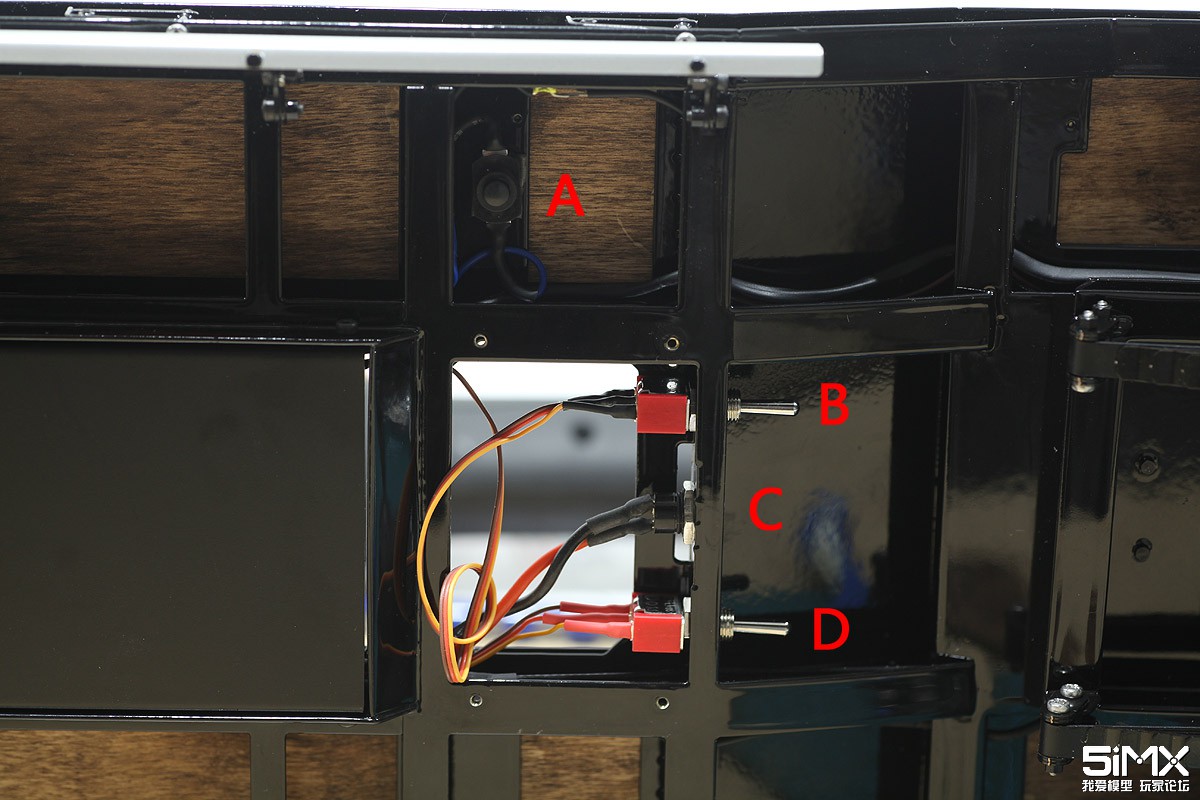
把自复位开关安装在上图中B位置,现在A、B、C、D的功能分别是:电源开关、绞盘收放、充电插口、尾板收放。

最后盖好底板,完成!
完成品鉴赏











业界快讯 More
- 12-26 【5iMX新闻中心】卡勃力特发布6x6全轮驱动
- 12-26 品牌合作丨 Flysky&Sunpadow FS-ST8、FS-
- 08-15 航模行业新生力量!星奇世界发布 STARGAZER
- 10-26 FMS新品:1/12比例德国82型越野车
- 09-26 1:16 AVVX 验证型两栖战车中秋节正式服役

- 活动
- 精华
More
-

【5iMX评测室】卡勃力特新品K3364 6x6全轮
-

4K时代,大疆新一代穿越机图传套件O3 Air U
-

史上最“耐炸”的无人机——大疆Avata飞行
-

-
斯普林格顶推小拖船
-

塞斯纳182像真套材
阅读排行 More
-
01
5iMX签到帖(2024-04-29)
珠海贤记救援,由于您累计签到98次,连 ... -
02
号手200伯克完工…吧
平时跑船的水池没水了,下过水调了配 ... -
03
K8
K8.也就是现在G8.工厂停产了,现在买 ... -
04
翼面朝向自己的自旋钟摆经验分享(一个月速
本人小菜鸡一直是一个人飞,没有人 ... -
05
地表最强赛斯纳!fms新品1.5米Cessna182像
这绝对是我最喜欢的fms航模之一,真机 ...
 /1
/1 
