作者:我心欲飞
首先我不是什么高手,只是菜鸟一枚。对固定翼无人机感兴趣,但又不想用商品飞控,尽管现在网上开源飞控的电路及代码都很多,讲的也很清楚,可我想按自己的想法设计一款,好玩! 航模之路就在于折腾。
思路如下:
1、CPU 肯定是用stm32f405了,407的脚太多,用不完浪费了,且不好布局。
2、采用“主板(最小系统) + 模块”式的方式搭建飞控。因现在的什么MPU6050、MC58831、MS5611等等现成的模块太多了,而且便宜稳定。只要在主板上预留好各模块位置即可。
3、扩展功能:除了预留各MPU模块接口外,在主板(最小系统)上可以对stm32f405的其它脚同时也引出,这样也可以形成一块试验板,可用此板进行其它功能使用。
因Designerl软件问题输不出PDF图,只能分割设计图
电源部分
蜂鸣
mpu6050及数传接口
GPS
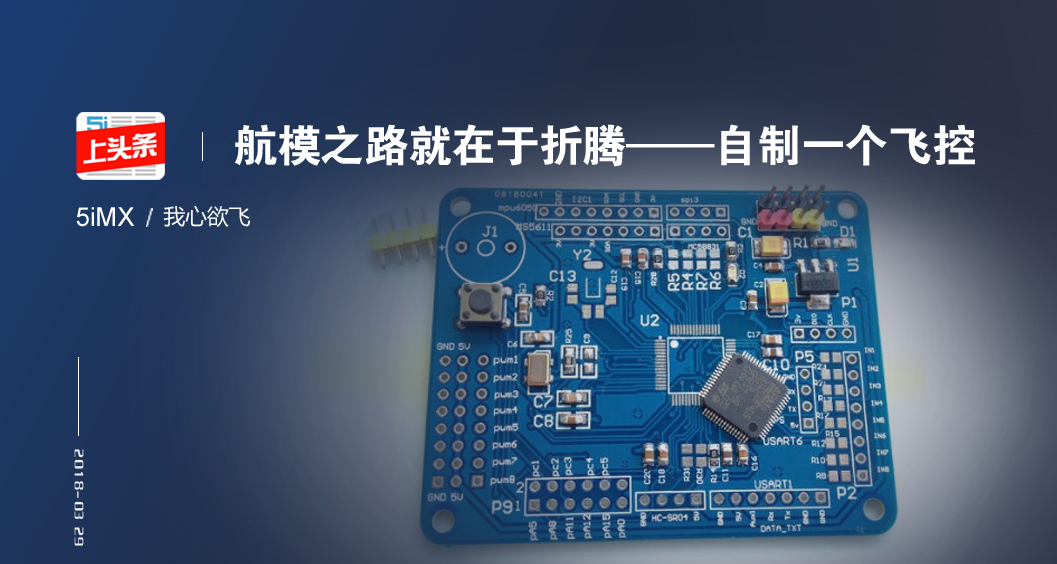
PCB电路板
计划先把硬件搞定,使之正常运行。之后再转入软件及算法部分,最后再研究MavLink协议,以用于各种现在地面站支持。望各位高手指点
PCB 打板
焊接是个技术活,功夫不够
郁闷啊,ASM1117 一连换了4个,电压都在3.26V 以下的,好容易才找到一个是3.28V的,这误差真坑啊。这不刚接好后,试一下时又把5V电源正负接反了,胆电容瞬间“砰”的一声炸糊了,妈呀!
吓死宝宝了。之后又换了一个电容,上电正常, 还好示波器看下电源部分波形很好,经大电容处理纹波很小。
好不容易焊完
飞控测试
请大神们指点

责任编辑:5imx
 /1
/1 
